Paso 2: conexiones

Conecte los servos a los canales de salida 1 y 2. Tiene el motor adecuado en el canal 1, el motor izquierdo en el canal 2.
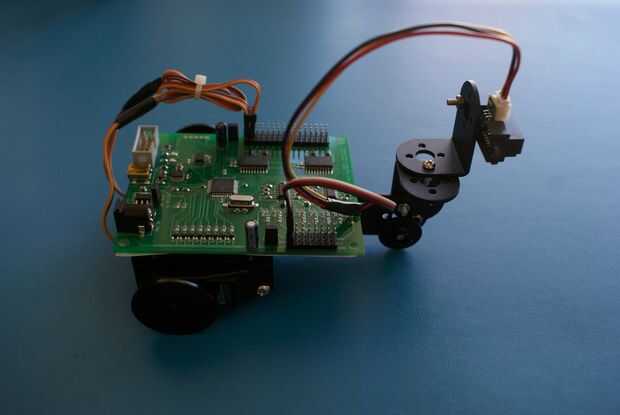
Conecte el sensor de distancia de IR hasta el canal de entrada 1.
Ahora estamos listos para empezar a programar








")

 con Arduino y Android(bluetooth)")


