Paso 3: Configurar las entradas y salidas
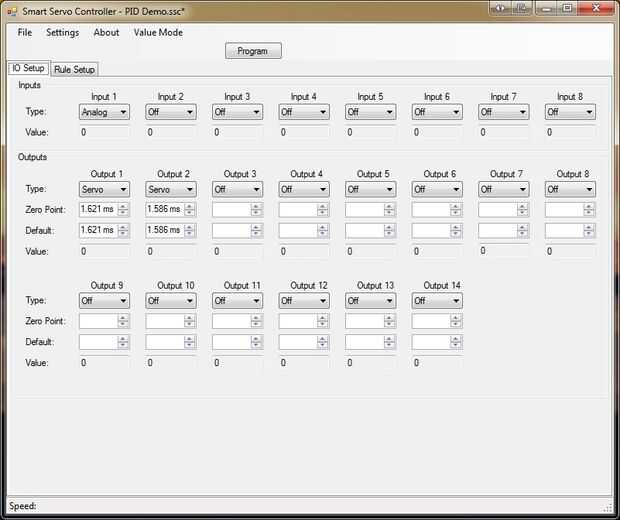
Ponga 1 entrada en analógico. El sensor de infrarrojos que estamos utilizando salidas de una señal analógica que es proporcional a la distancia.
Establecer salidas 1 y 2 en servo. Establece el valor predeterminado y punto cero para que el motor del servo no se mueve. Utilizando la herramienta de selector de valor (Ctrl-Click) esto hará más fácil. Mover el deslizador selector arriba y abajo hasta que el servo detiene.
El valor predeterminado es el valor que se pone a los servos, cuando no hay ninguna regla se activa.
El punto cero es la virtual posición cero de la salida. Valores arriba de este número son consideran positivos y los valores siguientes se consideran negativos. Esto permite que múltiples reglas para agregar apropiadamente. Este valor permite también el valor de salida de controlador PID que se añadan en correctamente.








")

 con Arduino y Android(bluetooth)")


