Paso 4: El bucle de Control
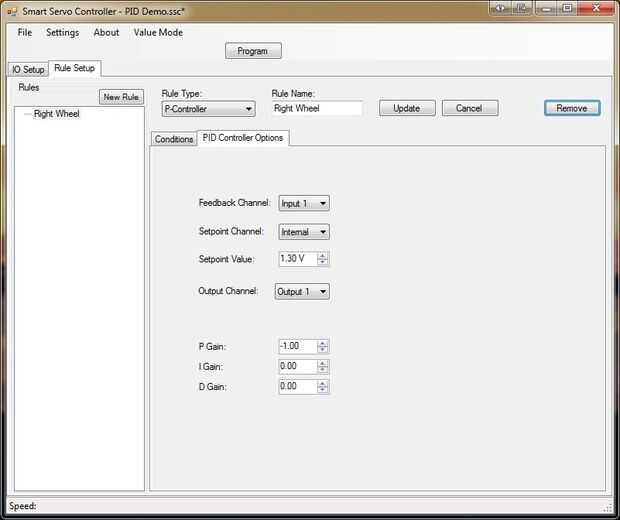
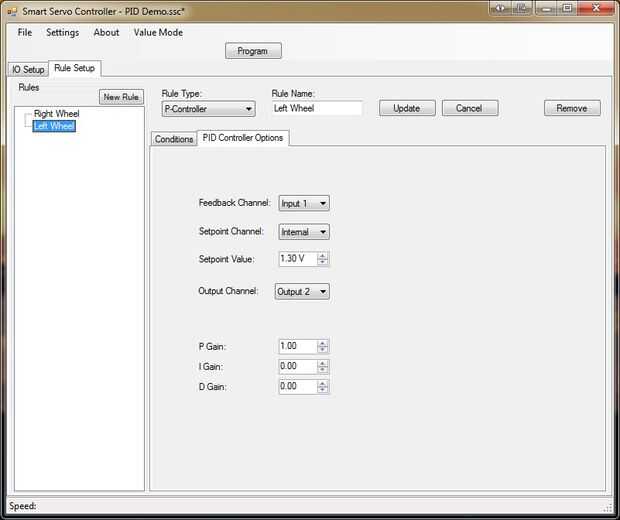
Necesitamos crear un lazo de control para cada una de las ruedas. Seleccione controlador PID y ajuste el canal de retroalimentación 1. Esto es donde se conecta el sensor de distancia. Nuestra consigna será un valor fijo. Establezca este valor con la herramienta de selector de valor. Establezca el canal de salida la que el motor servo se conecta demasiado.
En esta demo no necesitamos usar el o términos D hasta ponerlos a cero. Jugar con la ganancia de P. ajuste alto provocará una respuesta rápida pero puede causar oscilaciones. Demasiado baja y que tendrá una respuesta lenta. Porque uno de los servos se voltea hacia atrás, uno de los logros debe ser negativo para acomodar. De lo contrario el robot intentará girar.








")

 con Arduino y Android(bluetooth)")


