Paso 3: Hardware
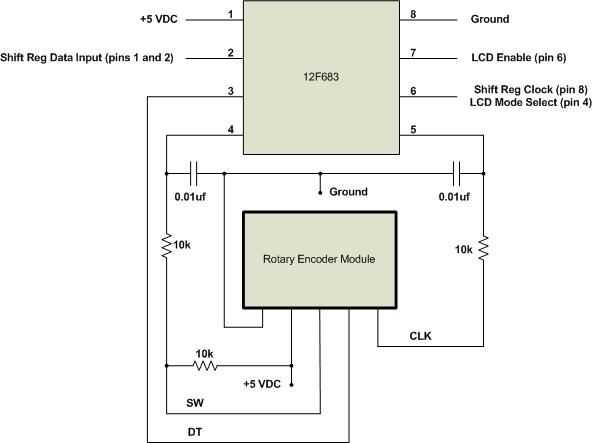
En el diagrama anterior se muestran las conexiones de hardware para el módulo. Los pernos están marcados en el tablero así que si usted compra uno que es diferente de lo que fue en la foto anterior las funciones equivalente deberían ser obvias. La interfaz de la pantalla de LCD de 1602 se basa en el hardware y software detallados en el episodio 1 para que detalle no se muestra aquí. La única diferencia es que los pines PIC para el LCD y el cambio de registro se movieron para que el pin de interrupción externo puede ser utilizado para esta aplicación.
Algunos codificadores rotatorios son ópticos por lo que la parte mecánica sólo es el eje de rotación. Los más baratos, como el que se usa aquí, son básicamente mecánicos necesitan algún contacto contra rebotes. Contra los rebotes se pueden hacer en hardware o software pero el esquema que se muestra a continuación incluye hardware RC simple contra rebotes. La línea del interruptor del módulo de codificador incluye un 10 k Levante resistencia porque la R1 en la parte inferior de la placa del módulo fue dejado en blanco. Podría Solde un resistor de vatios ¼ normal a los botones R1 o simplemente agregar externos a la Junta. El circuito debounce en la línea CLK no incluye una resistencia adicional de k 10 ya que tire para arriba ya se proporciona en el módulo. Algunas personas también añadir debounce en la línea del DT, pero que no es necesario para nuestra aplicación porque esperamos la línea DT que ya en un nivel de lógica de estado estacionario cuando la línea CLK activa nuestro software. No podría ser el caso si el eje del codificador se une a algo así como un motor que genera una mucho mayor tasa de rotación que va de los dedos. En cualquier caso, no vendría mal añadir el mismo circuito debounce a la línea del DT.














