Paso 2: Hardware
En los dos episodios anteriores utilizamos un itty bitty PIC de 8 pines sólo porque podríamos. En este episodio estamos caminando hasta un PIC de 14 pines. El que utilizamos aquí es el 16F688. Me gusta por muchas razones, no menos importante que es que no tengo que cambiar los puentes de mi programador al cambiar entre esto y el PIC de 8 bits hemos estado utilizando. La pereza puede ser un motivador poderoso.
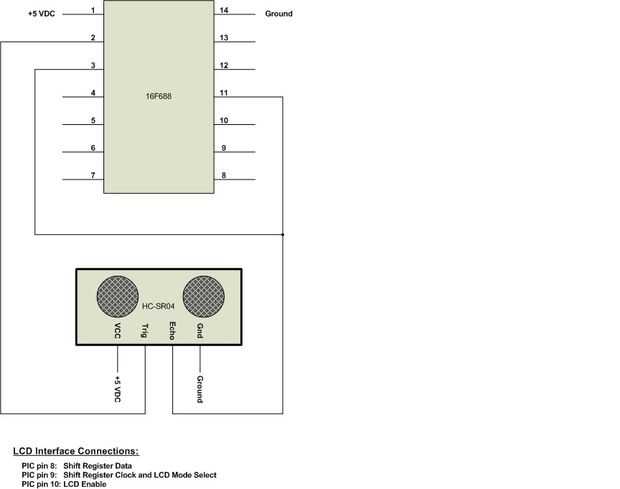
Como se puede ver en el diagrama, el módulo ultrasónico está conectado a tres de los pines PIC. El software soporta la interfaz LCD que detalla episodio 1 y el pin utiliza conexiones se enumeran en la parte inferior del diagrama. Puesto que tenemos varios pins de I/O disponibles en esta versión de la PIC, tienes varias que puede elegir entre el interfaz del LCD y el disparador al módulo de ultrasonidos. Lo que es crítico en el cableado es que el pin eco del módulo ultrasónico debe conectarse a los pines 3 y 11 de este PIC, o con los pernos equivalente de cualquier PIC utilizas. El pin 3 es la entrada de Timer1 Gate (T1G) y el pin 11 es la interrupción externa (EXT o INT). T1G nos ayuda a medir el ancho de pulso del eco que entonces podemos convertir a distancia. INT (o EXT en algunas fotos) nos impulsa a ir leer Timer1 al final del pulso de eco. En la práctica, T1G habilita Timer1 empezar a contar cuando Echo va alta y detiene Timer1 cuenta cuando Echo baja. Al mismo tiempo, el borde que va baja de Echo provoca una interrupción externa en el pin INT. Dado que estamos usando el reloj interno de 4 MHz del defecto del PIC, Timer1 se incrementará a una tasa muy conveniente 1 mientras que mide el pulso de eco.













