Paso 1: Pulse Width Modulation (PWM)
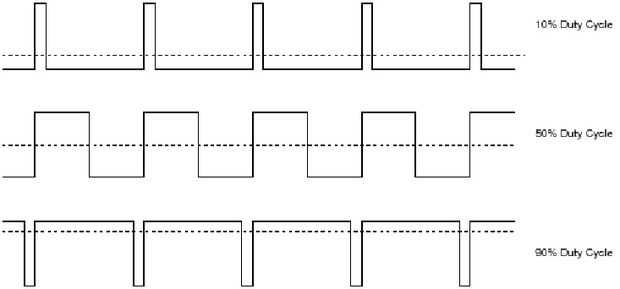
Para aquellos de ustedes que no están familiarizados con PWM, no es tan aterrador como suena. Todo lo que realmente significa para nuestra aplicación de control del motor simple es que generamos una onda cuadrada de cierta frecuencia, y luego cambiar el ciclo de trabajo. Ciclo de trabajo se define como la proporción de tiempo que la salida es un lógico alto en comparación con el período de la onda. Se puede ver claramente en el diagrama sobre la forma de onda superior en el ciclo de trabajo 10%, la forma de onda media en el ciclo de trabajo 50% y la forma de onda inferior al 90% del ciclo de deber. La línea de trazos superpuesta en cada forma de onda representa la tensión equivalente vista por el motor. Dado que muchas fotos tienen una capacidad PWM construida en, es realmente bastante simple generar este tipo de control de motores DC. Una otra ventaja de usar PWM es que ayuda a mantener el motor de la puesta en marcha bamboleante que puede pasar cuando se utiliza la recta DC. Una desventaja del PWM es que a veces es un ruido audible del motor a la frecuencia del PWM.













