Paso 2: Hardware
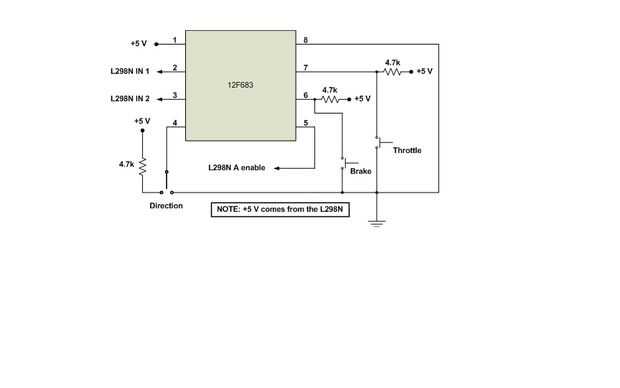
La primera imagen muestra las conexiones del PIC. Los valores de resistencia no son críticos ya que sólo se utilizan para sostener sus respectivos pines de entrada en un nivel lógico alto. Hay resistencias pull-up débil internamente en el PIC que podría utilizarse en su lugar pero prefiero utilizar resistores externos para una mayor inmunidad de ruido. El interruptor de dirección es un simple interruptor SPDT (un polo doble tiro) sin un centro de la posición de apagado. Los interruptores del acelerador y el freno se muestran como normalmente abiertos, momentáneos contacto botones. Fácilmente podría reemplazar estos dos interruptores con un sola SPDT toggle interruptor de contacto momentáneo. En este caso, el contacto de centro se conectaría a tierra, uno fuera de contacto conectado al pin de mariposa del PIC y el otro contacto externo conectado al pin de freno del PIC. De esa manera podría empujar el interruptor hacia arriba para acelerar y hacia abajo para frenar. Soltando el interruptor volvería al centro de la posición de apagado en sus el propios.
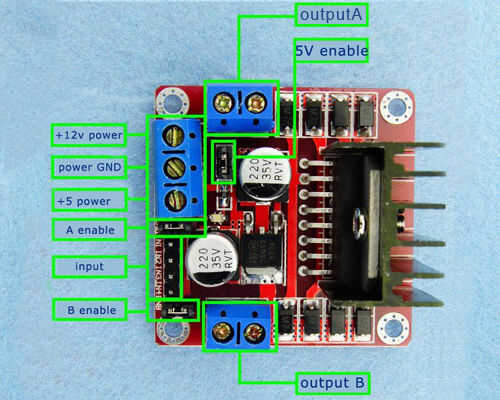
La segunda foto es nuestro viejo amigo el módulo de puente H dual L298N que hemos utilizado en un episodio anterior. Las diferencias de cableado en esta aplicación se basan en dos cambios desde nuestra aplicación anterior. En primer lugar, necesitamos + 5 VCC para la lógica del módulo y para el PIC pero queremos + 12 VDC para conducir el motor. En este caso aplicaremos los + 12 VCC a la "+ 12V power" entrada el L298N y dejaremos el puente "enable 5V" en su lugar. Esto permitirá que el módulo construido en regulador de 5 voltios en función de la entrada de 12 voltios. Luego se toma la conexión "+ 5" en el módulo y utilice para alimentar nuestro circuito PIC. No olvide conectar los cables de tierra para el + 12 de entrada y el + 5 salida al módulo "alimentación GND".
El segundo cambio de la utilización anterior de este módulo es que queremos que la tensión de salida varíe basado en PWM generado por el PIC en lugar de sólo ser completo en o apagado total. Para ello, quite los puentes "A activar" y "Habilitar la B" y conectar nuestra salida PWM de PIC (pin 5) en un "activar" en el módulo. Tenga en cuenta que el pin enable real es la más cercana al borde de la mesa (al lado de las clavijas de "entrada"). El pasador posterior para cada activación es + 5 voltios por lo que nos quiere asegurarse de que no conectar a la.
Los pines en el módulo "IN1" y "IN2" están conectados a los pines PIC 2 y 3 respectivamente. Los pines de control la dirección del motor y, sí, hay una buena razón para dejar el PIC control en lugar de simplemente conectar un interruptor al módulo. Vamos a ver por qué en la discusión de software.













