Paso 1:

Tracker = Runtime.createAndStart("tracker","Tracking")
tracker.setRestPosition (90, 90);
tracker.setSerialPort("COM3");
tracker.setXServoPin(3);
tracker.setYServoPin(11);
tracker.setCameraIndex(1);
tracker.initTracking();
tracker.initControl();
tracker.initInput();
tracker.trackLKPoint();
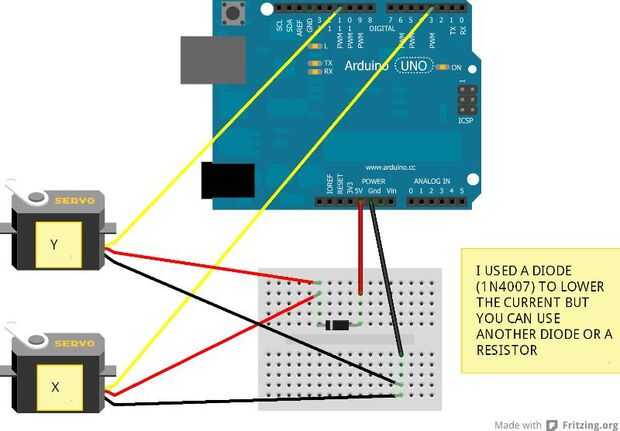
Y el Arduino cableado diagrama proporcionado aquí. La primera vez que conectes tu Arduino, debe subir el dibujo incluido en el servicio de MRL Arduino y asignar los pines de salida correcta en el servo lengüetas de servicio. Viendo el tutorial y mi video rápida usted tendrá un buen manejo en la instalación. Myrobotlab puede hacer mucho más, con más funciones de agregado casi todos los días... ¡ PRUÉBELO! Mira, Chris






 a ThingSpeak con un Arduino, utilizando ENC28J60 Ethercard")





 a ThingSpeak con un Arduino, mediante cable o WiFi (ESP8266)")
