Paso 2: Construir el campo





Utilizamos un sistema de construcción Tetrix, que incluye varias piezas de aluminio, motores, engranajes y ruedas, para hacer nuestros robots de competición. Tetrix partes compuestas la mayor parte del lanzador de la bola, como las fotos muestran. También usamos las piezas del kit de Lego Mindstorms NXT : el ladrillo NXT (un microcontrolador) controla los motores y recibió la entrada de dos sensores de tacto Mindstorms (interruptores). El actuador que empuja las bolas también se hizo de piezas Mindstorms. Programamos el lanzador de la bola para que cuando se presiona cualquier sensor, dos ruedas (acolchadas para que encajen mejor) comenzaría a girar y un actuador en forma de x empujaría una bola adelante para iniciarlo. Hubo un pequeño retraso añadido después de cada toma para que los niños no solo mantenga presionado el botón. El lanzador de la bola fue programado mediante el lenguaje ROBOTC .
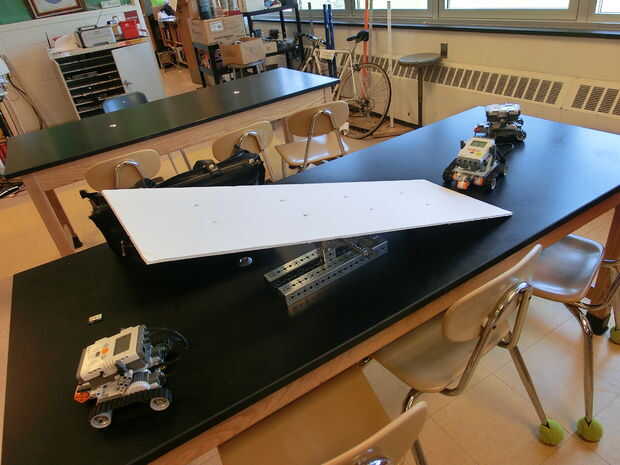
Las rampas de fuera de balance se hicieron con piezas Tetrix y cartulina de espuma. Sus puntos de giro estaban fuera del centro para que le lean una forma predeterminada.
La plataforma fue hecha de una caja de cartón, como fueron los objetivos de rojos y azules.
Para el suelo del campo, hemos utilizado azulejos de espuma (los mismos que se utilizan en competiciones de FTC). Las paredes del campo fueron hechas de madera y tubo PVC.
Todo esto tomó algunos meses para diseñar y construir, y pasamos por muchas versiones antes de establecerse en este caso. Para cada diseño, hemos probado con robots reales para ver cómo funcionaría. (No tenemos ningún real cuarto grado en la mano para conducirlos, así que tuvimos que utilizar en lugar de estudiantes de primer año).







")




