Paso 1: Cableado y motores
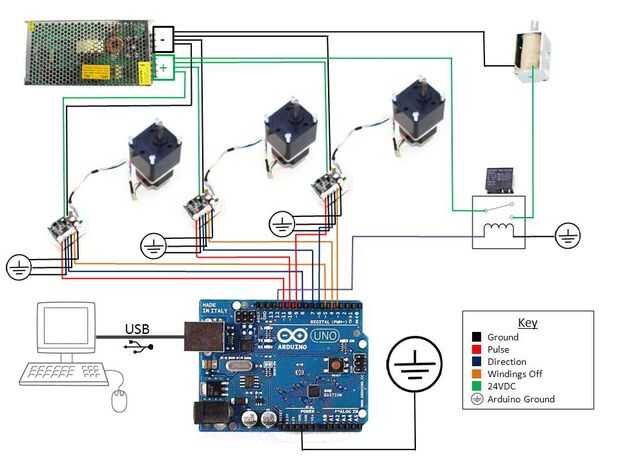

2. conectar los motores a los conductores - este cableado depende de los motores y los controladores que seleccione. Si utilizas los que hicimos, que una rápida conexión con un conector Molex.
3. Conecte los conductores a Arduino. Controladores de motor la mayoría tienen una dirección, pulso y los cables de tierra común o pulso CW, pulso CCW y tierra. Estos son los que le preocupa sobre todo. Algunos tienen "todas las bobinas de" y otras opciones.
4. Conecte uno de la solenoide de los cables a la fuente de alimentación.
5. Conecte el relé de control de la C.C. a los pines de Arduino y la tierra común. Si se trata de un relé de estado sólido, asegúrese de conectarlo en la dirección correcta, o no cambiar. No conecte el cable de normalmente abierto () a la fuente de alimentación y el otro al solenoide.
6. poner el engranaje de acero en el motor de bender y la perilla moleteada en el motor del alimentador. No puso el engranaje de nylon del motor Z-doblan aún.
7. antes del siguiente paso, pruebe el Arduino y programas del proceso para asegurarse de que gire los engranajes y el solenoide se mueve como se esperaba.













