Paso 11: Localizar la posición inicial para piernas
Este es un procedimiento importante, los procedimientos de instalación:
1. subir el código "legs_init" al Arduino para activar los servos
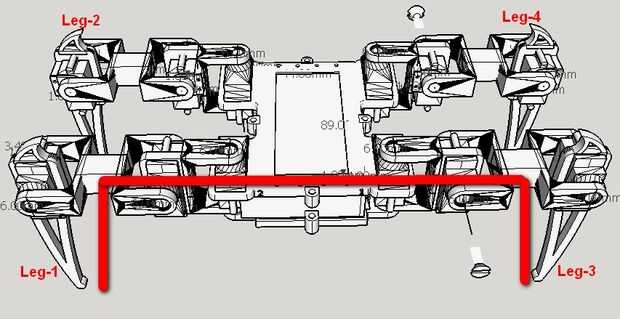
2. Coloque las patas como muestra en la posición de la imagen 1 e instale el servo de balancín con tornillos.
3. Apriete todos los tornillos
código fuente de legs_init:

![[DIY] Araña Robot - parte II - mando](https://foto.askix.com/thumb/170x110/6/af/6af5f83abe746bd95c9b5d4f19ccc4e8.jpg "[DIY] Araña Robot - parte II - mando")










