Paso 2: esquema:
Ahora siguiendo atentamente el diagrama del circuito y probar el circuito en el tablero de pan primero.
Si funciona correctamente, ir a hacer su versión de PCB. el PCB para el proyecto es PCB casera que es
se muestra a continuación.
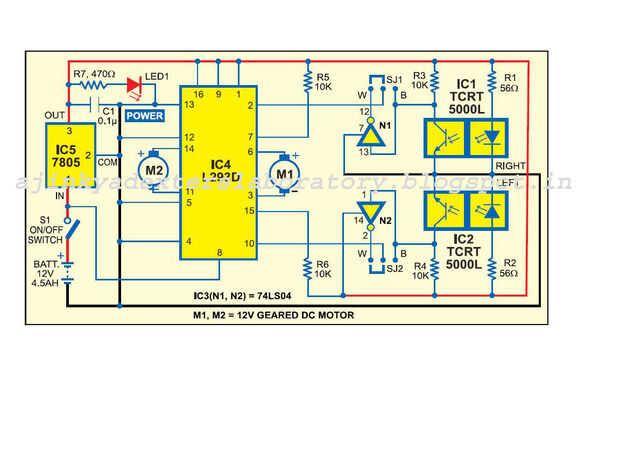
Estos Robot rastreador de línea utiliza la parte principal que es el chip del populer IC -IC L293D el conductor del motor IC / H - puente IC!!!!!!
El esquema muestra el pin - para - las conexiones de pines del L293D!!!!!!
He implementado estos circuito en el protoboard primero para la confirmación y después de que el circuito final se implementa en PCB.
Aunque estos esquema muestra el uso de Optoaisladores, he utilizado el simple LED (blanco) y de LDR como sensores.
Puede utilizar fotodiodos como alternativa de LDR pero requiere cambio en ella es detección de frecuencia debido a la diferencia entre la velocidad de la luz absorbida por él en día y la noche. (CNY70 ES LO MEJOR SOBRE TODO ESTO).
Depende del valor del pote de elección, sino entre la gama de frecuencia de los sensores.
Para hacer ROBOTS seguidor de línea he probado muchas variedad de motores como el motor del juguete, motor de reproductor de DVD, registrador de cinta motor,
y así sucesivamente. Pero finalmente comprendí que estos motores no funciona para estos robots.
Por lo tanto he usado los 12 v DC 12V engranaje motores de tener 150 RPM.
Usted puede utilizar 3 ó 6 v DC 12V engranaje motores también.
Nota: El PCB y toda descripción está fácilmente disponible en línea. Por favor vaya a través del enlace:http://electronicsforu.com/diy/hardware-diy/simple-line-following-robot




")



")




")