Paso 2: Impresión de la mano

Puesto que ya hay instrucciones detalladas sobre cómo construir esto no entraré en mucho detalle, pero tiene un montón de piezas en sus archivos así que voy a entrar en los que tienes que imprimir:
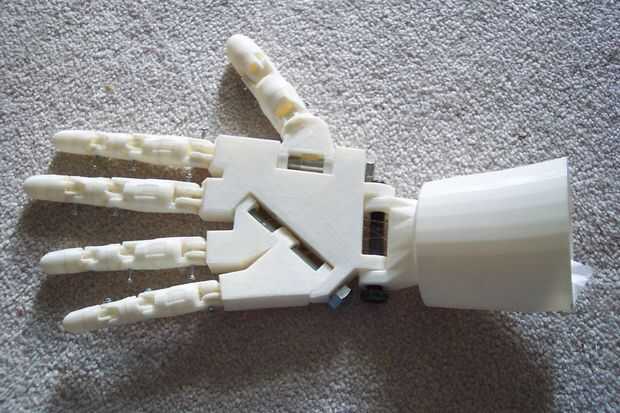
Desde su primer thingiverse post necesita imprimir las siguientes partes (usar los mismos nombres de sus archivos):
Los dedos: Auriculaire3.STL, Index3.stl, Majeure3.stl, ringfinger3.stl, thumb5.stl
Palma: WristsmallV3.stl, WristlargeV3.stl
Muñeca: robpart1.stl
Antebrazo medio: robpart2V2.stl, robpart5V2.stl
Ahora a su otro post thingiverse necesita estas partes restantes:
Montes/piezas del motor: RobServoBedV4.stl, RobCableFrontV1.stl, RobCableBackV2.stl
Otros medio antebrazo: (Estos son cubiertas solo por lo que para la funcionalidad no son necesarios) robpart3V3.stl, robpart4V3.stl
Para imprimir las piezas usé un Makerbot Rep 2 y construido todas las piezas con 2 conchas y relleno 15% sin apoyo en ninguna de las impresiones (él ya ha construido en soportes). Que utiliza impresiones de definición estándar para los dedos y 'baja' resolución imprime para las piezas del brazo/muñeca.










