Paso 5: cableado
![]()
![]()
![]()
![]()
![]()
![]()
![]()
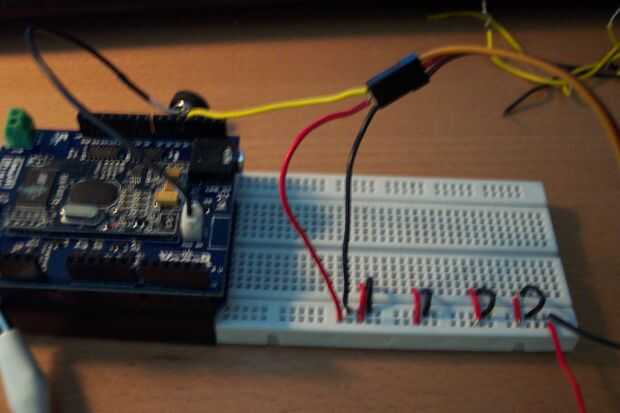
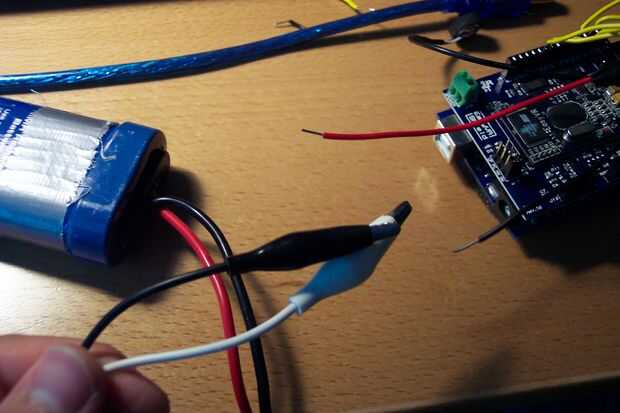
recomiendo breadboarding tu circuito (aunque es muy simple) antes de soldar los cables entre sí. Básicamente todo el circuito consiste en conectar cada servomotor hasta un terreno, el poder y el cable de señal. El suelo los cables todos combinaran e ir a ambos el cable negro (-) de su 6V - 7.4V batería y una de las entradas de la tierra en su arduino (hacer que al hacer esto!!! Me causó cierta confusión cuando se me olvidaba). Las líneas de energía todos ir al cable rojo (+) de la batería. Los cables de señal deben ir a los pines digitales del arduino siguientes: 3, 5, 6, 9, 10. Ahora vamos a probar los motores con un programa simple de arduino. El código se adjunta a este paso en un archivo TXT, solo copia pega en un nuevo sketch de arduino y subirlo a la arduino. Si usted tiene o no tiene el escudo de EasyVR adjuntarlo no hará una diferencia. Si nunca has usado arduino revisa este tutorial. El código sólo gira cada motor individualmente y pasará por todos ellos.
Si Oriente el soporte de que todos los servos para que el lado con dos servos apunta hacia usted entonces la orientación de que servo va a que dedo es como sigue: la izquierda de los dos servos más cercanos es el meñique, entonces va en sentido horario alrededor de la placa son el dedo anular servo, servo de dedo medio, dedo índice servo y pulgar. Que tenía cada dedo conectado a los pines digitales como sigue: pinky 3 anillo figer a 5, dedo medio a 6, 9, dedo índice y pulgar a 10. Ahora si usted vuelve a ejecutar el programa de prueba del motor pasa por ciclos de los motores de meñique a pulgar y repetir.