Esta idea de proyecto vino a mí cuando estaba sentada en una cama en una habitación de hotel mientras estaba de vacaciones. Pensé: "Sería muy prolijo que una mano robótica que puedo controlar con mi propia mano!" Al volver a casa, me embarqué en un viaje para diseñar y crear el proyecto. Espero que lo disfruten!
Actualización: Primer premio ganador en el concurso de microcontrolador de Instructables 2013!
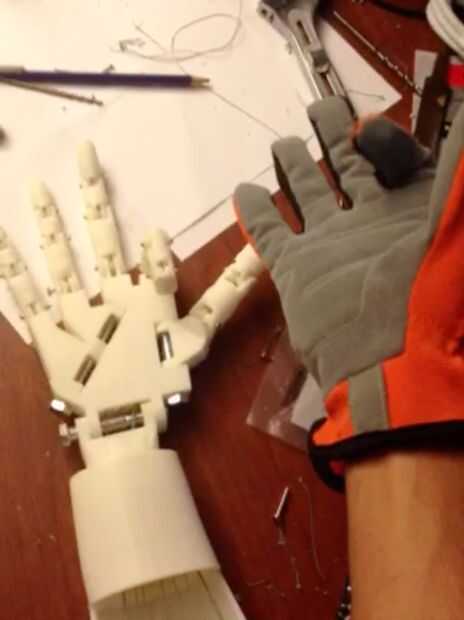
Los componentes básicos de la mano y el guante son la mano sí mismo, los servos, el Arduino, el guante y los sensores de flexión. El guante está montado con los sensores de flexión: resistencias variables que cambian su resistencia valoran cuando doblado. Está conectados a un lado de un divisor de tensión con resistencias de un valor constante en el otro lado. El Arduino lee el cambio de voltaje cuando se doblan los sensores y activadores los servos para mover una cantidad proporcional. Los servos tiran cadenas que actúan como tendones, permitiendo que los dedos se mueven. Aquí hay un video de ella en acción (
http://m.youtube.com/watch?v=qMtHEOxHDGo):
La mano sí mismo viene de una descarga de código abierto, 3D imprimibles. De parte de un proyecto llamado InMoov: http://inmoov.blogspot.com (http://www.inmoov.fr)
Esta guía le mostrará todos los pasos necesarios para construir su propio guante robótico de mano y control!








 (impresión 3D)")


