Paso 6: Probar los Servos
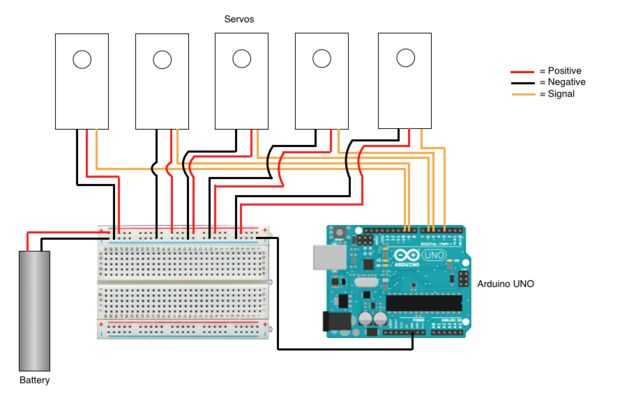

En este punto, ya deben montar los servos en el antebrazo (ver el enlace de montaje bocetos del paso anterior). Para conectarlos a la fuente de alimentación y Arduino, usé un pequeña protoboard sin soldadura. Conecte cada cable positivo del servo (generalmente rojo) a uno de los rieles de la placa y el cable negativo (generalmente negro o marrón) a otro carril. Importante: no olvide conectar el negativo carril en el protoboard a la Arduino de otra tierra: todos los GNDs en circuito necesario conectarse para él para trabajar.
Sube el programa a Arduino (se adjunta el archivo de texto - "Hand.rtf") y asegúrese de que todas las conexiones del guante y servos son correctos. Ponga en el guante y gire en el Arduino. Los servos deben girar en base a cuánto se flexionan los dedos. Si este es el caso, está trabajando! Si eres más experimentado con Arduino y sabe cómo poner a prueba los valores de entrada de sus particular sensores, puede ajustar el rango en el programa para que funcione mejor para usted. Supongo que todos los sensores son prácticamente idénticos, pero si no lo están, esto podría ayudar.
Si los servos no funcionan correctamente, asegúrese de que todas las conexiones son correctas (cuando hacía esto, originalmente olvidé conectar el GND de Arduino a la tierra de la batería y todos los servos, que causó problemas. Esta fijación permite que funcione). Asegúrese de que conseguir este trabajo antes de ir!
Si todavía estás experimentando problemas, revise la sección de comentarios de este artículo para preguntas previamente, como ya he respondido muchas. Si eso no ayuda, el mensaje me directamente en Instructables y responderemos lo antes posible.








 (impresión 3D)")


