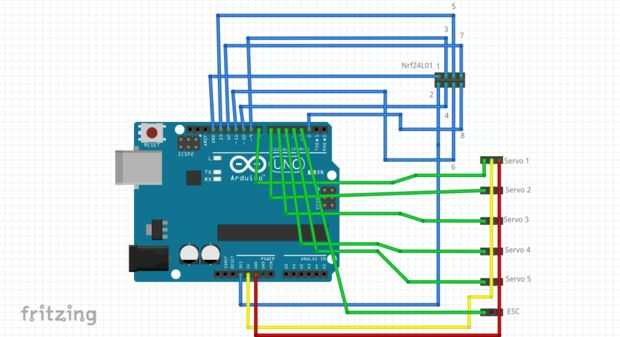
Paso 10: El receptor circuito



https://Arduino-info.wikispaces.com/Nrf24L01-2.4GH...
Proporciona un buen tutorial sobre cómo interfaz nrf24l01 con arduino uno usando la biblioteca rf24.
Personalmente creo que es el más fácil de usar y entender, sin el adición de mucho desorden en el código de la biblioteca rf24 .
En mi módulo utiliza el tablero de adaptador del zócalo que mejora la calidad de la señal y mejora el rango de operación. puesto que la mayoría chino arduino uno no ofrecen voltaje constante, así que estos módulos no funcionarán.
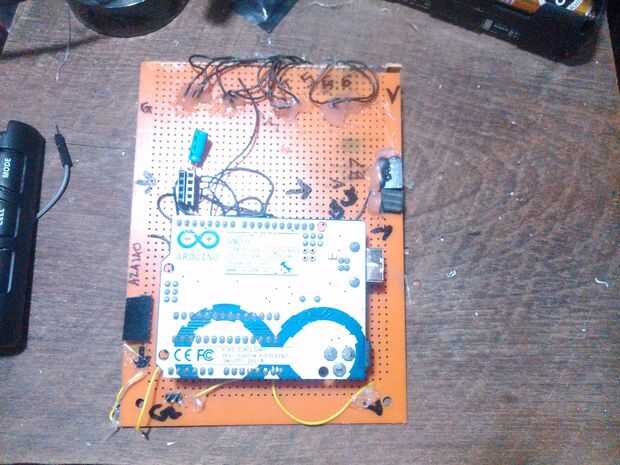
El GPS está conectado a la Rx y el Tx de la arduino uno. Una cosa a cuidar es que cuando transferencia de GPS vía el transceptor, verifique el modo avión está configurado para enviar, y la estación base se establece en modo de recepción, y esto debe suceder cuando no existe ninguna transmisión de control, control es inactivo.
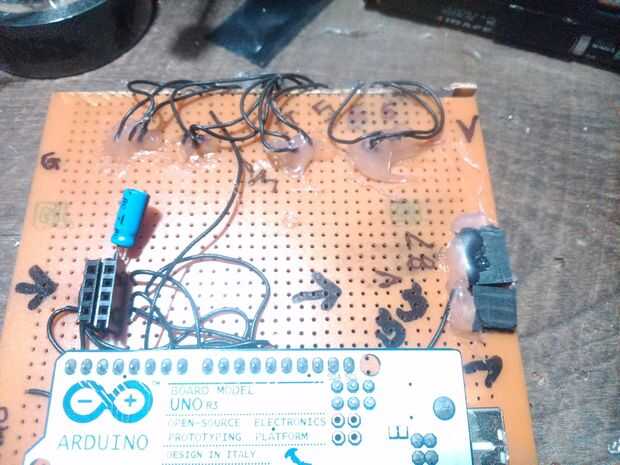
Cuando conecte lo servos asegúrese. Proporcionar seprate GND y VCC de los servos, Arduino no es diseñado para servos de potencia, también recuerda común GND de Arduino a la GND de la fuente de alimentación externa para el servo del.
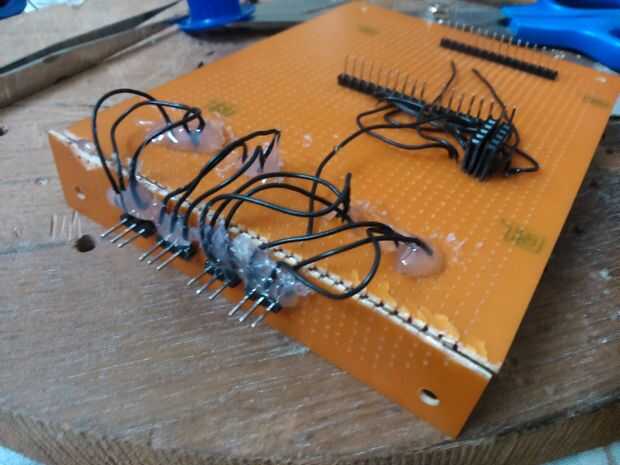
Ya que no planeo utilizar un tablero de adaptador del zócalo para regular la alimentación del transceptor, tuve que crear otro circuito para el transceptor y el regulador en mi placa madre existentes de la interfaz. Puede encontrar los detalles de en el paso siguiente.
El sensor de inclinación utiliza tres entradas analógicas para enviar los datos a arduino, y obtendrá información de inclinación a lo largo de la X, Y y Z ejes. Conecté los pines A0, A1 y A2,
Planeo utilizar los sensores extras (tilt sensor/GPS) con una frambuesa pi por lo que estos no son realmente necesarios si va a volar en línea de la vista.

")

 Kit DIY")



")





")