Paso 13: Potencia y conexiones

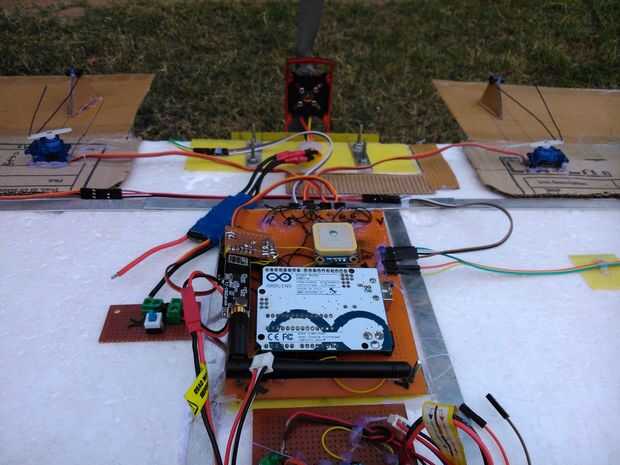
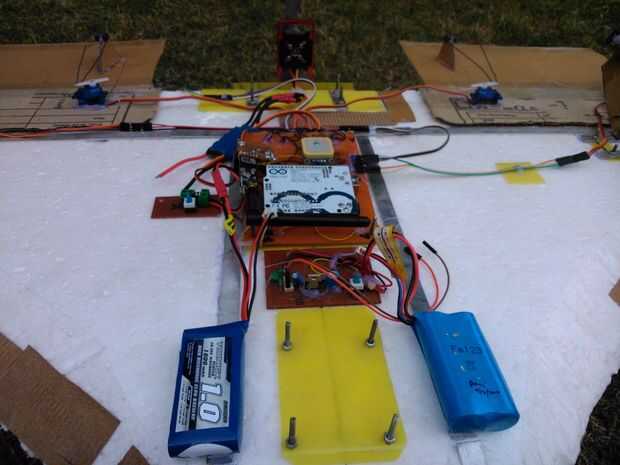
Tengo dos LiPo de alimentar el plano entero, un 1200mAh proporciona energía a la Motherboard, Tarjeta madre, que además proporciona a los servos, el segundo es un 1000mAh para alimentar el motor. Recomiendo usar batería de buena calidad que duran más que las más baratas. Son caros pero una buena inversión.
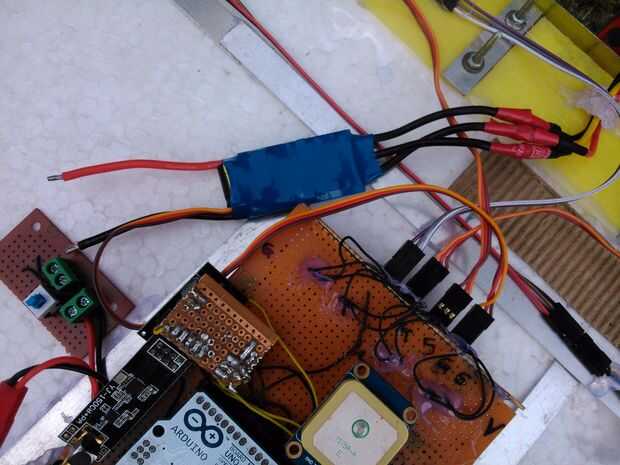
La placa base es alimentada con 5 regulador de voltios de corriente continua, conectado con el polímero de litio.
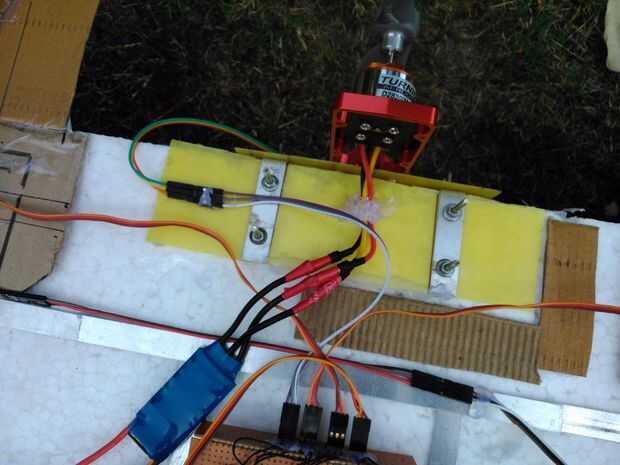
La LiPo dos es fijos en el chasis muy rígido por medio de pegamento caliente así que no plantean ningún problema en absoluto, también ten en cuenta deje enfriar el pegamento antes de aplicarlo a la LiPo o podría sobrecalentar la batería que no es buena. Esto es muy importante, te sugiero utilizar una doble cinta echada a un lado si tiene problemas al conectar la batería porque caliente pegamento.
El GPS no es necesario, si el plano sobre el Drone en línea de la vista de las operaciones. Pero agregué todos modos para usar con una frambuesa pi en el futuro.
En teoría podría utilizar el transceptor para enviar los datos GPS y los datos del sensor de inclinación, pero el hecho de que los transceptores sería ociosos durante 5-10 segundos es raro en caso de funcionamiento en línea de la vista, así que sería mejor utilizar una frambuesa pi regulador micro y subir los datos a un servidor y reservamos los transceptores para las operaciones de vuelo.

")

 Kit DIY")



")





")