Paso 1: diseño
Centro de gravedad
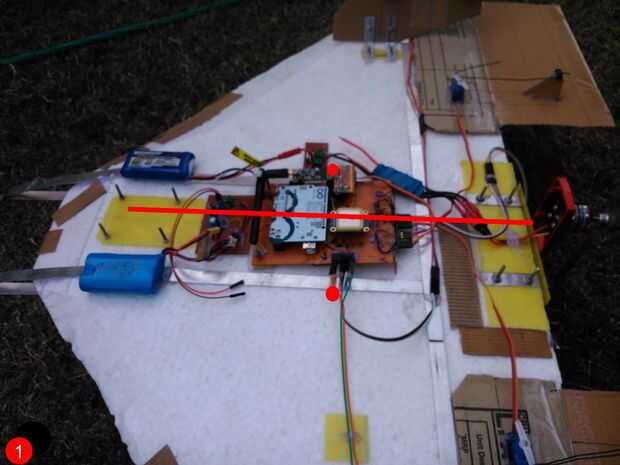
El centro de gravedad es fundamental. Aviso que tengo dos paquetes de baterías en la parte delantera y un motor en la parte posterior para equilibrar la diferencia de peso en el modelo.
Si usted puede levantar el modelo con dos dedos (dos manos), en un punto tal que no caiga, usted ha encontrado el centro de gravedad para el Drone. (Imagen 1)
Para visualizar esto, imagina que tienes una pelota por debajo de los aviones no tripulados. Si las inclinaciones del abejón mush demasiado en una dirección, se caerá. Similar es la situación con la corona, mediados de aire, usted tiene que asegurarse de que su robot mantiene constante vuelo durante el vuelo.
Integridad estructural
En un avión tan grande, habría considerables fuerzas de viento y arrastre que afectan el plano, entonces usted tiene que asegurarse de que usted asegurarse de que su robot no rasgar aparte de su propio peso al sacar.
Para asegurarse de que, he añadido las tiras de aluminio en el cuerpo del avión para proporcionar fuerza al cuerpo principal y las alas.
Aerodinámica
Diseño de los aviones no tripulados limita el control sobre el aumento de altitud como el zumbido se quita.
Las superficies de control en la parte posterior sólo proporcionan
1) control sobre el rollo de los aviones no tripulados
2) frenos de aire
El diseño no es eficiente con algunas cuestiones de mayor control, pero en su mayor parte.
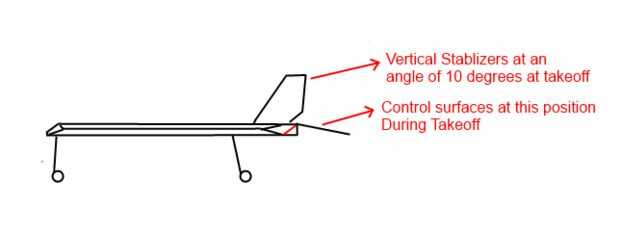
Los estabilizadores verticales proporcionan
1) control de desvío de los aviones no tripulados
He añadido los estabilizadores en un ángulo, con el fin de controlar la elevación y la caída del avión, puesto que las superficies de control en la parte de atrás no estaban para arriba para el trabajo.

")

 Kit DIY")



")





")