Paso 7: El controlador del Motor
Así que opté por el conductor del Motor de Sparkfun: http://www.hvwtech.com/products_view.asp?ProductID=1266
También puede utilizar el regulador del Motor de chip, pero es caro: http://www.hvwtech.com/products_view.asp?ProductID=915
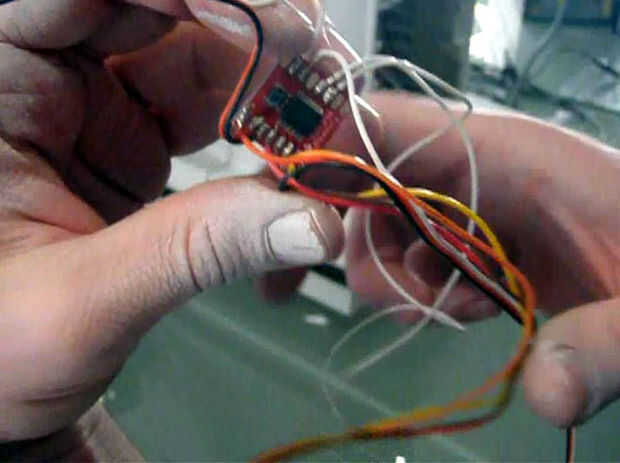
Cableado del regulador del Motor es muy simple. Las instrucciones incluidas con el controlador elige tendrán etiquetas para cada motor + y -, así como los 2 canales desde el microcontrolador. Controladores de motor se llaman HBridges, y compra los reunidos le ahorrará un gran bullicio en la fabricación de su propio.
Usted puede hacer una búsqueda en google sobre HBridge para leer más acerca de ellos. En pocas palabras, son una colección de transistores que permiten controlar la dirección de un motor a través de las líneas de la lógica.
Si está utilizando el código fuente de .net OmniBot, expansión tenga en cuenta también hay un puerto ADC para el control de los motores. El elegí el controlador del motor no tiene un pin de carga de tensión, pero usted puede conseguir alrededor de eso. Cuando los motores están bajo mucha tensión y carga, un poquito de wll actual positivo detectar en el GND alimentación el controlador del motor. Se desea supervisar la tierra con una conexión de ADC directamente en el controlador del motor para ser exactos.
Cuando el software de monitoreo observa un poquito teeny de voltaje positivo (causado por un cortocircuito) en la tierra en el controlador del motor, la rutina detiene el robot, retrocede, mira izquierda y gira a la derecha, en el sentido de la libertad.
, con piezas hechas en casa (Guía del reciclaje) primera parte")







")

