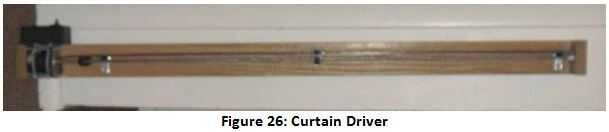
Paso 33: Abra las cortinas: (prototipo CNC eje) implementado


Un botón de activación local y un interruptor arriba/abajo fue agregado al frente de la caja del proyecto. Los interruptores de activación local están conectados en paralelo a los conectores de señal de activación externa con el fin de no interferir con el microprocesador activando el sistema. Todas las conexiones de señal para el mundo exterior se hicieron con terminales de tornillo que se puede acceder a través de orificios creados en el cuadro de proyecto y que puede verse en la figura 27.
El motor paso a paso usado para este subsistema es un motor de 23 NEMA tamaño y fue comprado en e-bay con dos otras unidades idénticas por $30. Tiene una resolución de 1,8 grados por paso y 56 pulgadas oz de sostener el esfuerzo de torsión.
Es un motor de pasos unipolar de plomo y pueden ser conducido de 12-36 VDC. Se midió la profundidad del marco para ajustar el tamaño motor 23. El motor fue unido a la estructura mediante los agujeros de montaje y tres tornillos de máquina de 2''. Una guía de metal hueco (slider) se colocó en línea con el eje del motor para mantener la varilla roscada. La barra de control deslizante fue doblada para caber a través del orificio de montaje final de los motores y a través de un agujero perforado en la parte superior del marco.
El circuito electrónico fue unido al lado del marco con ataduras de cremallera que pasan a través de los orificios perforados en el cuadro de proyecto para el montaje. Interruptores de límite momentáneo del rodillo fueron montados sobre pequeños soportes en L en ambos extremos de la varilla roscada y cableado de los interruptores fue alimentado a lo largo de la parte posterior del marco y en el cuadro de proyecto. Para llegar a los interruptores de límite con los alambres, los agujeros fueron perforados a través del marco y el cableado a través y soldadas a los contactos del interruptor. Esta configuración mantiene el sistema muy compacto y limpio busca. El cableado de los interruptores de límite se aprecia en la figura anterior, mientras que el montaje del motor se aprecia mejor en la figura 28.
Se mantiene la velocidad del motor paso a paso lento para demostrar el control de precisión para movimiento lineal y rotacional. Como resultado la tuerca de acoplamiento tarda aproximadamente media hora para recorrer la longitud de la varilla roscada. Para la demostración el conductor cortina fue accionado mediante los interruptores locales. Modificando mi código usted puede hacer fácilmente que la barra gire más rápido, y tiene la tuerca de acoplamiento recorrer la longitud de la barra en 10 o más segundos.
Futuras versiones del controlador de cortina pueden mejorarse mediante la adición de un interruptor de parada de emergencia, un regulador externo y un seis jefe del pin de programación. La cabecera Programación permitiría un usuario interfaz fácilmente al microprocesador sin tener que desmontar todo el sistema. Esto puede usarse también para probar diferentes programas con una mayor eficiencia.
Los diseños eléctricos y mecánicos son sonido y pueden utilizarse con ligeras modificaciones para una variedad de aplicaciones . También se reconstruirá el conductor cortina utilizando un motor de C.C. con interruptores de límite y un puente en H.
Cuando reconstruido esta he utilizado un motor del engranaje de faulhauber y un codificador de motor rotatorio magnético reprap que yo creo que ahora puede obtener de makerbotindustries. Una fotorresistencia y un reloj en tiempo real fueron utilizados para que sea un abridor de persianas independientes, pero también acepta una entrada de pulsos para que lo puedo un día conecto al sistema principal mediante un enlace inalámbrico. La implementación es similar a este instructable.
Mi esposa no le gustó la idea de esta apertura lo que frente ciega cuando caminaba por la mañana en un albornoz. Así que he decidido que irá en el dormitorio de invitados... has sido advertido!






)")



")


