Proyecto Arduino powered
Tomamos nuestra inspiración de dibujos de mandala que se crean mediante la elaboración de cirkels. Hemos construido un Artbot que puede crear estos dibujos sí mismo.
VIDEO
http://www.youtube.com/watch?v=BgZZEOCFeCA&feature=youtu.be
MATERIALES
-madera
-arduino + escudo del motor
-cinta
-marcador
-poco de los neumáticos
-Batería de 9V
-los cables
HERRAMIENTAS
-ilustrador
-Arduino
-Herramientas para soldadura
-Láser de corte
PROCES
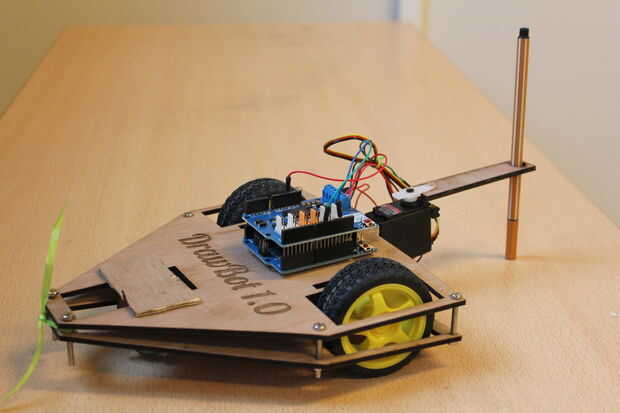
1. diseñar tu artbot en illustrator. Atamos los archivos para que tengas una idea sobre el tamaño. Nos hemos asegurado que el arduino encaja en el coche y hemos mantenido un montón de espacio para los neumáticos. Hemos hecho dos de las juntas, así que usted puede poner los neumáticos en el medio.
2. vende los cables a las ruedas
3. Fije los pernos, para que las ruedas se mantengan en la misma posición.
4. Conecte el motor servo a la parte trasera del coche con dos tornillos (2, 5mm de ancho). En el motor servo, colgar el brazo para su marcador. Se pueden diseñar de muchas maneras diferentes. En nuestro caso, hemos hecho de un marcador.
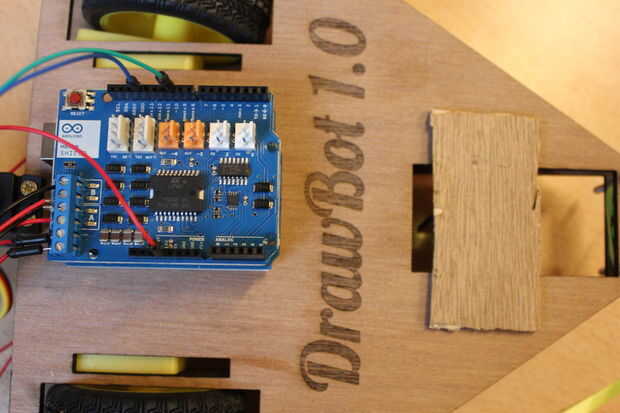
5. conectar el arduino en el coche con el escudo del motor en ella. Entonces tienes que conectar los cables a tu arduino (véase los cuadros).
6. Añadir el código para el arduino y conecte la batería de 9V.
7. Conecte un cable a la parte delantera de su coche y a otro extremo a un poste. Estás listo para llamar ahora.
CÓDIGO
#include
Servo myservo; crear objeto servo para controlar un servo
se puede crear un máximo de ocho objetos de servo
int pos = 0; variable para almacenar la posición del servo
void setup() {}
myservo.Attach(10); se fija el servo en el pin 9 al objeto servo
Configuración de canal A
pinMode (12, salida); A pin inicia canal de Motor
Configuración de canal B
pinMode (13, salida); A pin inicia canal de Motor
Un avance a toda velocidad del motor
digitalWrite (12, bajo); Establece la dirección de avance de canal A
analogWrite (3, 255);
Motor B hacia adelante a toda velocidad
digitalWrite (13, HIGH); Establece la dirección de avance de canal B
analogWrite (11, 255); Gira el motor en canal B a toda velocidad
}
void loop() {}
para (pos = 0; pos < 90; pos += 1) / / va desde 0 grados a 180 grados
{/ / en pasos de 1 grado
myservo.Write(POS); Dile el servo a la posición en la variable 'pos'
Delay(2); espera 15ms para el servo a la posición
}
para (pos = 90; pos > = 1; pos-= 1) / / va de 180 grados a 0 grados
{
myservo.Write(POS); Dile el servo a la posición en la variable 'pos'
Delay(2);
}
}

")




")





