Paso 5: Añadir electrónica

Configuración de zumbido de la inclinación, no es muy diferente en comparación con cualquier corredor de bricolaje, pero hay algunas especialidades. Porque se inclina dinámico aún no es muy común, su no soportados en cleanflight normal, necesitará usar 10.1 beta o tiltflight que puedes encontrarlos de la tienda de chrome.
Sólo FC que se apoya en los es Naze32 rev5. Después de flashear el firmware, puede elegir inclinación quad confiquration menú. Existe ficha para brazos de inclinación.
Debe asignar un canal para el control del brazo de inclinación. Usé uno de potenciómetro en taranis radio para eso. Posición media es normal donde los brazos no se mueven. Girar el bote, brazos giran hacia delante manualmente. Cuando da vuelta bote contador inclinación hacia la derecha, dinámico modo está activo. Los brazos sigue echada palo movimiento. http://youtu.be/BsWNes7PXq4
ADVERTENCIA: Cuando usted prueba/configuración su abejón, asegúrese de que hacer pruebas sin hélices. I rebanada cortinas y pared detrás de ellos en ruinas. Tuve la suerte de que mi zumbido no salta sobre mí. Mi esposa no estaba muy contenta...
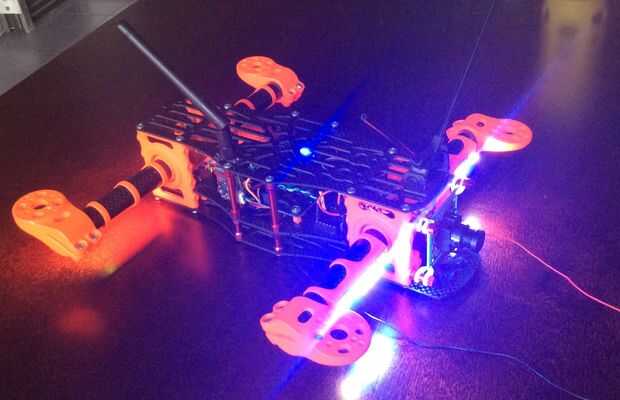
** Tiras de LED deben funcionar 5V voltaje, pero tenía un montón de parpadear cuando apoyándolos con London. He probado con la fuente de alimentación regulable y strated para soltar tensión. En 4.2-4.3V tengo luces estables. He añadido Diodo led + 5V plomo y 480 ohmios resistencia para señal de cable y parpadeo desapareció con salida de 5V en PDB.

")







")

 gratis!")
")
