Paso 5: electrónica!





Esta parte es relativamente fácil, se divide en pequeños pasos:
- Preparar los motores
- Cargar el software en el Arduino
- Prueba el Arduino + drivers + motores
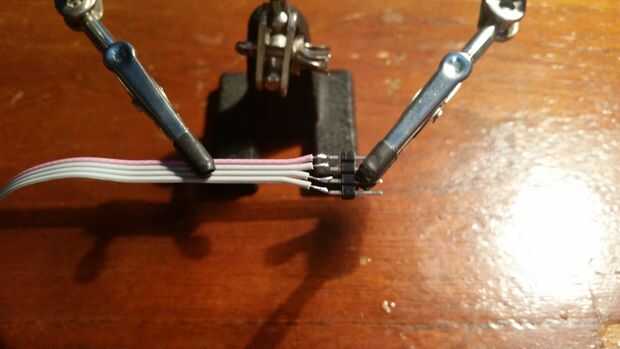
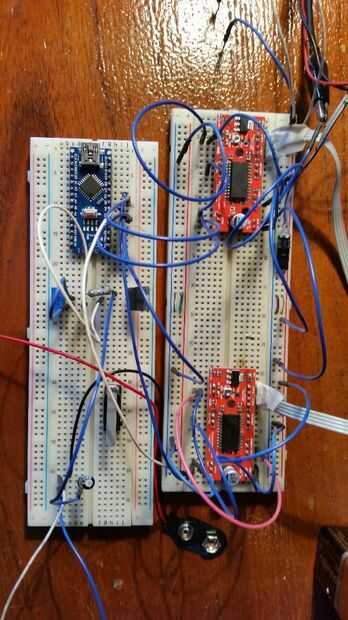
Preparar los motores
La mayoría de estos motores tienen 4 cables corresponde a 2 bobinas, así que tenemos que encontrar los que corresponden a que la bobina. Lo hemos hecho en el paso 3, pero voy a citarme a mí mismo cómo hacerlo ahora:
Para comprobar los steppers necesita poner su tester/multimetro en el valor de resistencia (el uno con el Ω [OHM]) y medir entre 2 de los pasos. Ir con pares que necesitas encontrar 2 pares de pines con resistencia un poco (generalmente entre 6 y 10 Ω, siendo el más común 6Ω y 8Ω). Una vez que encuentre el cable de cinta de soldadura y deja el otro extremo con el cable pelado por ahora. Usted puede, si usted quiere soldar a pinheaders temporal para poder colocarlos en un breadboard.
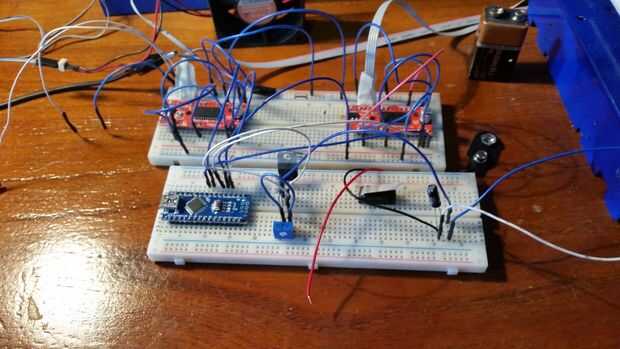
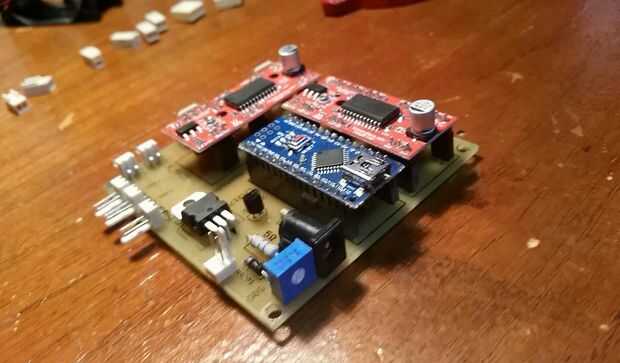
Te incluyo en este paso la necesidad de una fuente externa, como habrás dado cuenta, el easydrivers tienen una entrada para una fuente de alimentación separada para los motores. Esto es porque el arduino no puede manejar la corriente que manejan los motores, ni el voltaje. En este caso esto motores trabajo bien con 5v y 12v (calientan mucho más rápido así que ten cuidado), todavía necesita una alimentación externa porque dibujan mucho más actual que el arduino.
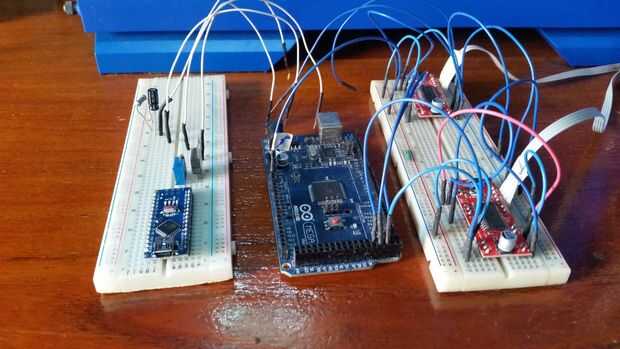
Carga GRBL en Arduino
En primer lugar, cuando conectado por primera vez mi arduino NANO mi computadora no reconoce, no tengo idea por qué, necesitaba algún conjunto de controladores específicos para el nano, así que tuve que buscar para ellos. Que trabajó conmigo, estoy en Windows 7 64 Bits.
2016-03-24:
El Nano original tiene un chip USB estándar que es reconocido por Windows. Pero muchos de los clones de Nano (los que sólo cuestan unos cuantos dólares) usan un chip de interfaz diferente llamado un CH340 que es mucho más barato pero no es reconocido por Windows, así que tienes que encontrar y cargar los controladores para él. Generalmente no es ningún problema pero he visto informes de que algunas marcas de laptop nunca reconocen el chip incluso con controladores.
Gracias TimothyJ999 por la idea! También he añadido el controlador a este paso, si lo necesita y no lo encuentras! es el archivo de rar CH341SER !
Ahora necesitamos un software para controlar el easydrivers en el arduino y algún tipo de interfaz con el ordenador para que podamos enviarle la GCODE de lo que queremos grabar.
Para el software que he usado GRBL 0.9f, aquí está el enlace para el proyecto git por lo que se puede descargar
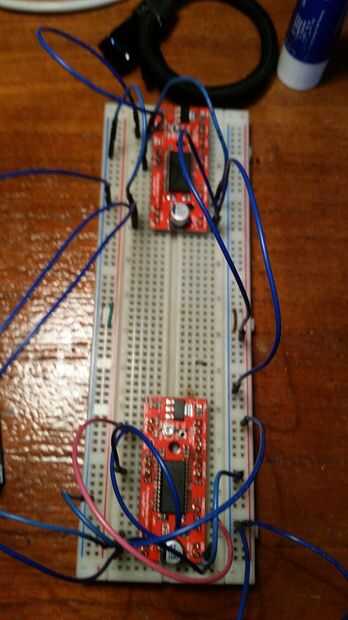
Al descargar los archivos desde la git GRBL proyecto verás que acabas con un montón de carpetas como en mi última foto. Que todo el trabajo, pero que tienen pequeñas mejoras o cambios aquí son las cosas más importantes que usted necesita saber:
- Esas carpetas que dicen Arduino UNO trabajará también con arduino NANO puesto que comparten el mismo pinout
- Hay un cambio importante en las versiones > 0.9f y eso es que agregaron una variación de la velocidad de huso Pin (esto se usa para modular el pulso a su láser para que no dibuje un montón de corriente, o si desea controlar la velocidad de una herramienta giratoria, como una dremel) esto es importante porque en las versiones anteriores este pin fue llamado "Huso enable" y estaba en un diverso perno , así que ten cuidado.
El pinout para el arduino NANO leer en este instructable
Para la interfaz estoy usando éste llamado controlador GRBL 3.6.1, no recuerdo donde he descargado, pero es gratis, así que lo busque.
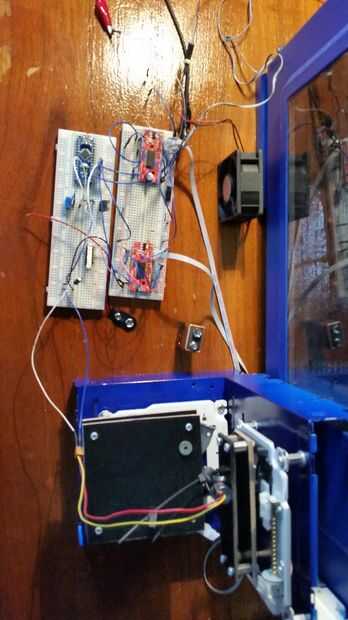
Prueba el Arduino + drivers + motores
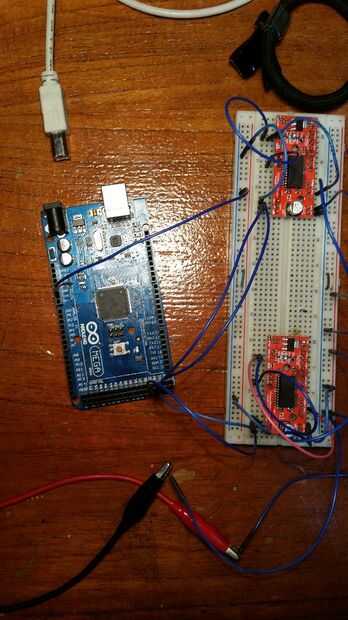
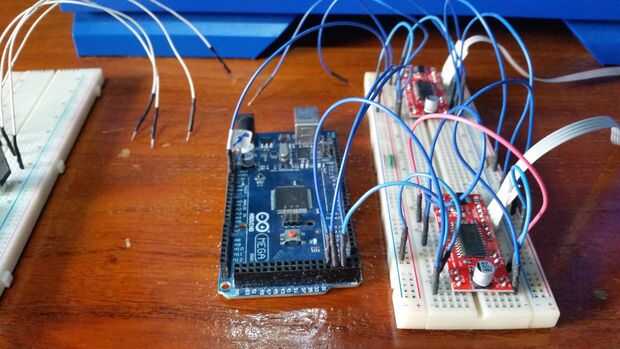
Ahora es el momento para nuestra primera prueba!!!! Esto es cuando vemos si nuestro bebé se mueve, o si creamos una abominación. No tienes que hacer estos pasos como este, pero encontré que esta orden minimiza la probabilidad de quemar cualquier cosa así, no dude en seguirlo!
- Conectar los motores a la EasyDrivers
- Enchufe el suplly energía externa a la EasyDrivers pero no enciende sin embargo.
- Conectar el EasyDrivers con arduino
- Encienda la fuente de alimentación externa
- Conectar el arduino con el PC
- Abrir y conectar el software GRBL
Debería ver algo como esto:
$0 = 10 (pulso de paso, usec)
$1 = 25 (paso demora inactivo, MS)
$2 = 0 (paso puerto invertir máscara: 00000000)
$3 = 6 (dir puerto invertir máscara: 00000110)
$4 = 0 (paso activar invert, bool)
$5 = 0 (límite pernos inversión, bool)
$6 = 0 (sonda pin invertido, bool)
$10 = 3 (estado informe máscara: 00000011)
.............
Esta es la configuración de su máquina, con el valor predeterminado valores así, antes de que enviemos algunos comandos que tenga cuidado, no hemos configurado nada sobre steppers, así que con estos valores de su muy probable para nuestro eje para moverse mucho más de lo que deberían y en diferentes direcciones. Así que si tu estructura es frágil, o los motores son omitir este paso y hacen la configuración primero. Si desea verlos moverse entonces enviar algunos comandos!!
Si hiciste todo bien, lo moveremos, muy rápido y probablemente no en la dirección que me dijiste que se mueva (por ejemplo decirle al eje X a avance 1mm y va al revés 100 m m). No se preocupe! Nosotros no hemos bien sintonizado nada todavía!
En orden a calibrar correctamente, puede utilizar esta página:
https://github.com/GRBL/GRBL/wiki/Configuring-GRBL...
Aquí está mi configuración final:
I calcula los valores de:
Así:
- Poner un número en el barrio de lo que usted piensa que puede corregir (por ejemplo 50 pasos/mm)
- Envíe una orden para mover el eje de una cantidad fija (por ejemplo 10mm)
- Medir cuánto el eje se movió realmente, (por ejemplo, el eje movió 15mm)
- Calcular el error de esta forma: e = (deseado movimiento / real movimiento) (en este caso e = 0.666...)
- Multiplicar el error que tienes, con el número original, (en este caso 50 * 0.666... =33.333...)
- Repetir con el nuevo valor (33.3333) y ajustar hasta que satisficiera.





 en el grabador del Laser")






")
 en el grabador del Laser")