Paso 6: El código
Consulte esto configurar el Edison de desarrollo Arduino
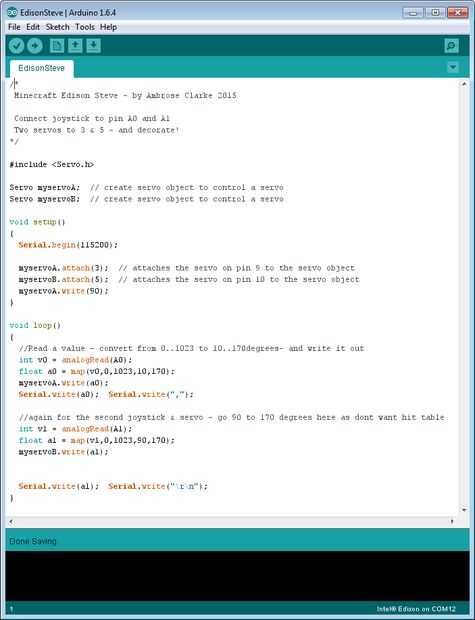
Subir el dibujo a continuación...
El código está comentado.
- Lee la posición del joystick X leyendo A0
- Convierte a este número en un número de 10 a 170
- Y esto como el número de grados a que del servo debe moverse
- Luego repite esto para el eje Y y salidas el segundo servo.
Utilizamos 10 a 170 grados en lugar de 0 a 180 como algunos motores de pasos de moler los engranajes en estos extremos.
De la espada - nos limitaremos el ángulo del servo para que no dejó la espada golpeó la mesa.
El código:
/* Minecraft Edison Steve - by Ambrose Clarke 2015 Connect joystick to pin A0 and A1 Two servos to 3 & 5 - and decorate! */ #include <Servo.h> Servo myservoA; // create servo object to control a servo Servo myservoB; // create servo object to control a servo void setup() { myservoA.attach(3); // attaches the servo on pin 3 to the servo object myservoB.attach(5); // attaches the servo on pin 5 to the servo object myservoA.write(90); } void loop() { //Read a value - convert from 0..1023 to 10..170degrees- and write it out int v0 = analogRead(A0); v0 = map(v0,0,1023,10,170); myservoA.write(v0); //again for the second joystick & servo - go 90 to 170 degrees here as dont want hit table int v1 = analogRead(A1); v1 = map(v1,0,1023,90,170); myservoB.write(v1); }








")




