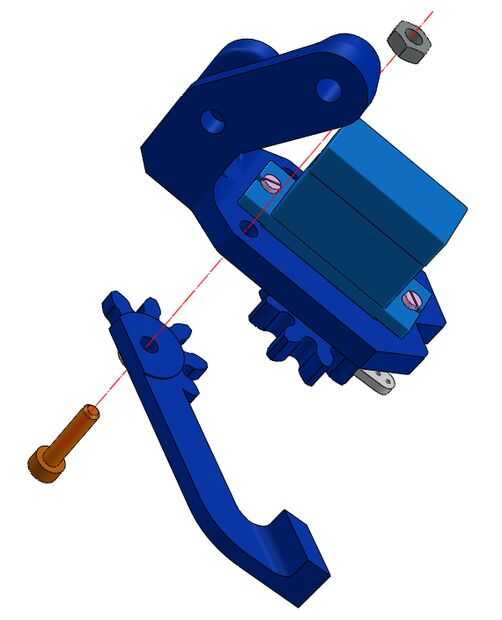
Inserte un M3 el tornillo en el agujero central conecta a la ayuda de la uña y luego firmemente la tuerca autoblocante comprobar la libertad de movimiento
Bienvenido al instructable para un brazo robótico controlado por gesto.Este instructivo consta de dos partes. Un instructable ya se ha escrito para el brazo robótico llamado EEzyBotArm. Se puede acceder al instructivo aquí-El valor agregado que en Cu
Este instructables se hace explicar cómo controlar mi EEZYbotARM o EEZYbotDELTA con un Smartphone (o una tableta). Esto se hace a través de la placa Arduino equipado con un módulo bluetooth y una aplicación Android con MIT App inventor 2.Video:En el