Paso 4: Montaje de la Base
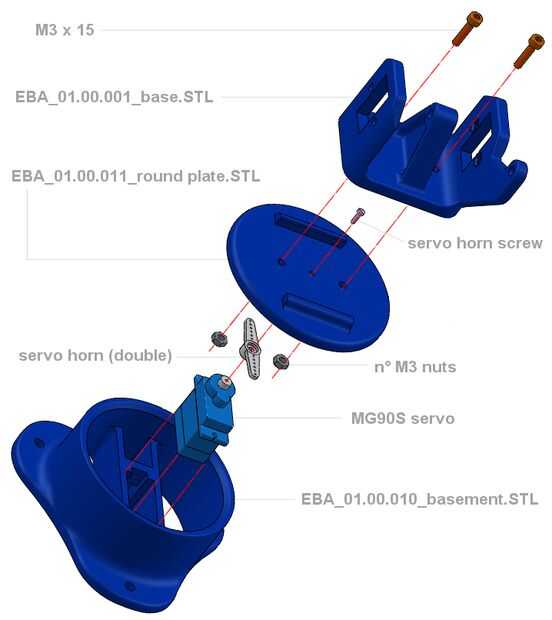
Lista de piezas:
· n ° 1 EBA_01.00.001_base.stl
· n ° 1 EBA_01.00.011_round plate.stl
· n ° 1 EBA_01.00.010_basement.stl
· n ° 1 TowerPro MG90S servo de metal con el cuerno de doble brazo
· Cuerno del servo n ° 1 tornillo de fijación
· n ° 2 M3 x 15 tornillo (VTCEI)
· tuercas de M3 n ° 3

