Paso 1: Montaje del brazo de impulsión principal

Bots de Delta se caracterizan en que están compuestos por múltiples elementos idénticos (generalmente tres o cuatro) que la placa, así que en este caso explico cómo Asamblea uno de él, que la secuencia debe repetirse para los dos restantes.
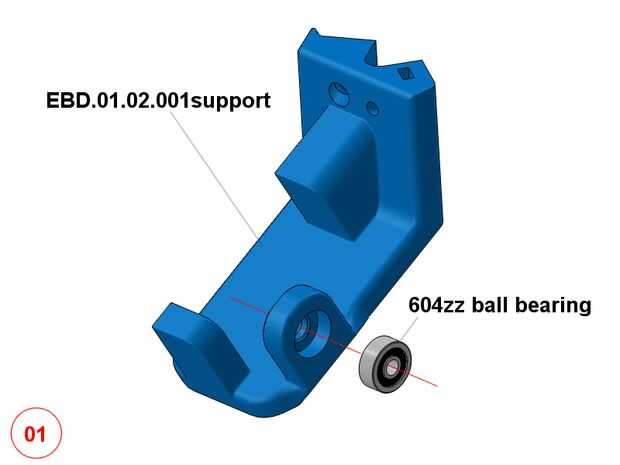
(1) Inserte el cojinete de 604zz en el alojamiento dedicado de "EBD.01.02.001support" (tenga cuidado de hacer presión en el anillo exterior)
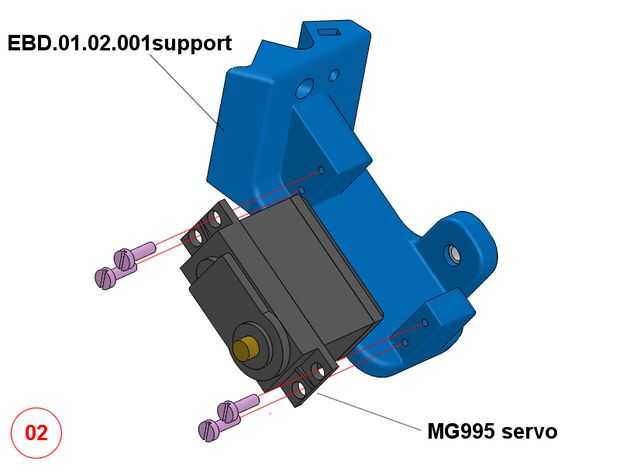
(2) Coloque el servo como se muestra en la imagen y fijarla con los tornillos (dos sería suficiente).
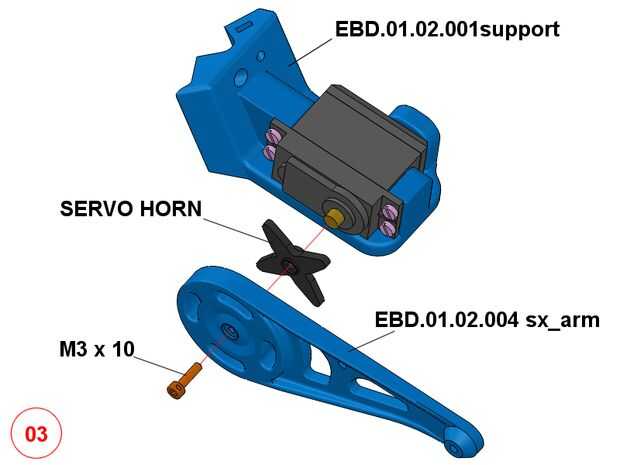
(3) Inserte el Cruz cuerno del servo en la caja de cruzados de brazo izquierdo y luego conecte los dos en el mástil principal del servo con un tornillo M3. Tienes que comprobar que el servo esté centrado y se asegura suficiente recorrido en ambas direcciones (arriba y abajo).
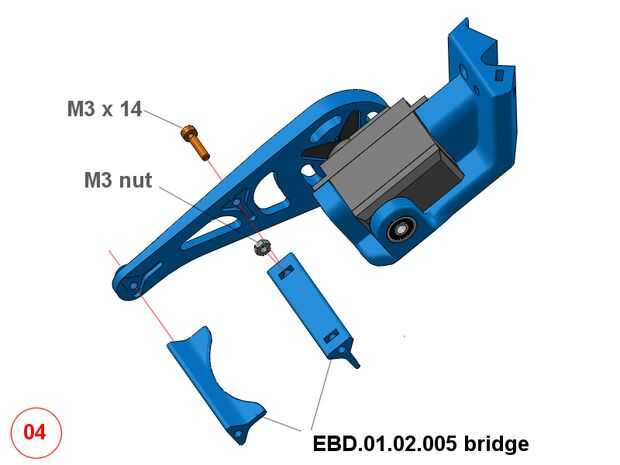
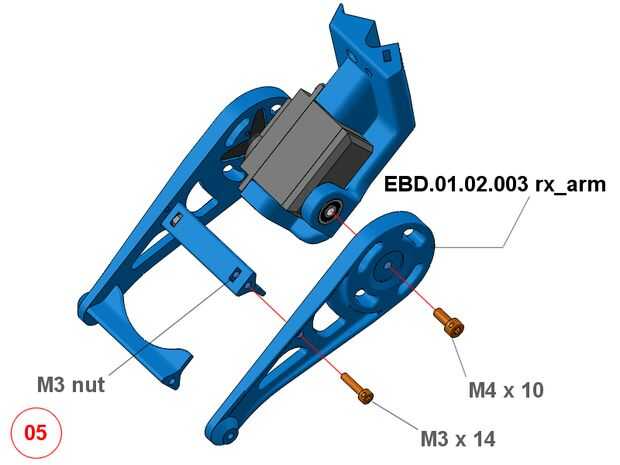
(4) de la gota en su vivienda las tuercas M3 y conectar dos "puente EBD.01.02.005" a la "sx_arm EBD.01.02.004" asegurar para insertar en el alojamiento dedicado "T" (si es necesario pulir los bordes)
(5) Conecte el otro lado del puente"EBD.01.02.005" con el brazo 003_RIGHT. Inserte un tornillo de M4 en la "rx_arm EBD.01.02.003" hasta a participar el rodamiento de bolas 604, comprobar que el servo gire smootly
Repita esta secuencia de montaje en los otros dos soportes principales













