Paso 5: Electrónica y cómo hacer que se viva

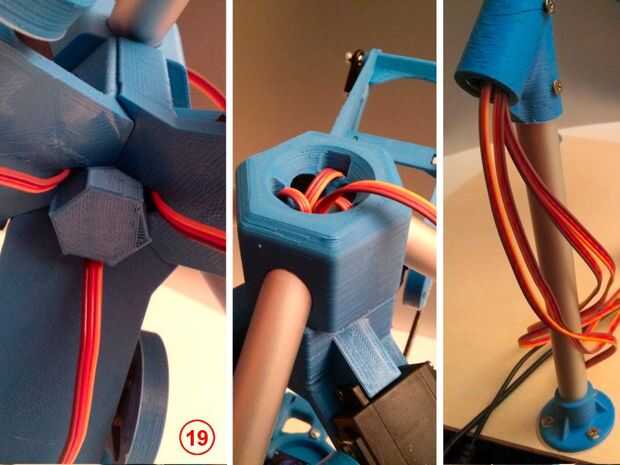
Los cables de servo pueden encontrar su ruta a la salida del centro del robot a través de una barra diagonal como se muestra en la imagen (19)
OK se hace. Ahora usted puede dejar tal cual y usarlo como una mesa cutre o hacerla viva.
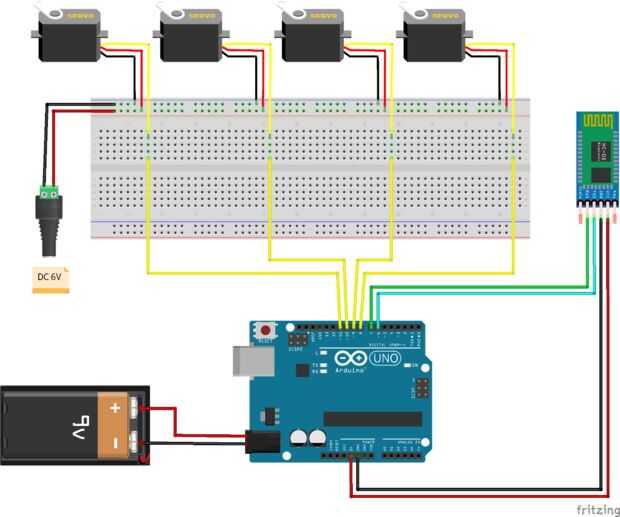
Si la segunda opción es tu opción, es todavía un largo camino. Puedo sugerir, para que sea más corto, para seguir mi Instructables que hice para conducir (o cualquier otro robot de 4 servos) utilizando un Arduino, un módulo Bluetooth y una aplicación Android hecho con MIT Appinventor
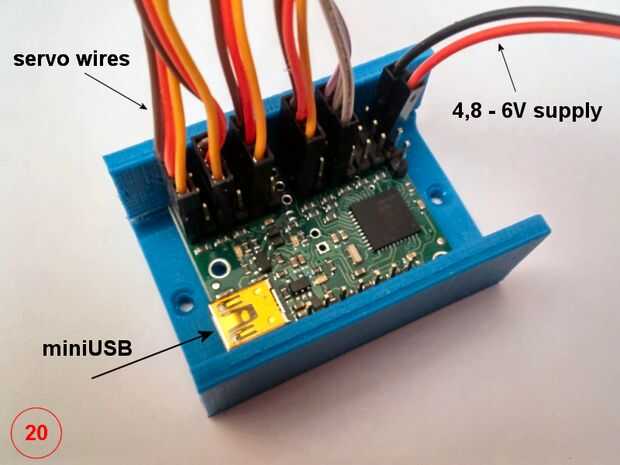
Como alternativa, les sugiero al maestro mini chip. No es tan barato (y también no gano dinero de ellos), pero debo reconocer que resolver muchos problema que no está tan seguro como yo con la electrónica. ( https://www.pololu.com/product/1353 )
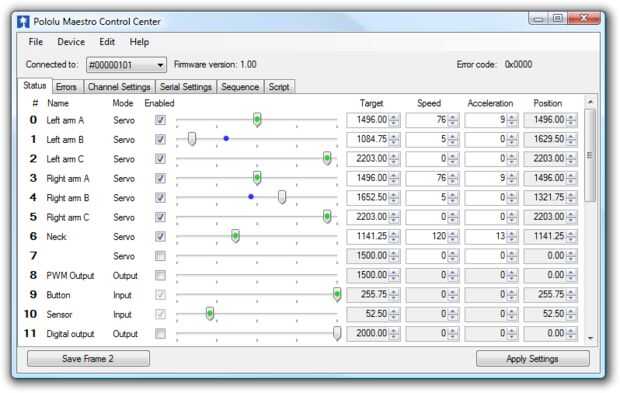
Conectarlo a la PC mediante USB y mediante un software libre (gran) ver desde su página web puede conducir el servo utilizando diapositivas en la lista interfaz (21). También puede hacer obras en un rango fijo de viaje siguiendo la aceleración y la velocidad que decidas en la pestaña de "Configuración del canal" dedicadoa. Pero la característica más interesante desde mi punto de vista, es que puede programar una secuencia simplemente almacenar una posición tras otra y luego hacerlo correr en bucle desde la pestaña de "Secuencia".
(20) la conexión es muy simple: el cable USB de la PC tiene que estar conectado a la conexión USB mini. Cables servo debe ser conectada a la fila del perno encabezado (en este caso utilizo un paso alternativo). Y entonces usted tiene que proporcionar un suministro adecuado en la última fila de pins de cabecera.
Como ya explicaba en mi anterior brazo robot, también hay varias otras maneras de controlarlo pero no quiero darle otra solución preparada. El propósito era sólo eso, producir un hardware suficientemente confiable y listo para permitir a los usuarios explorar de manera controlarlo.
da/theGHIZmo













