Paso 6: El circuito de conducción
Pero los controladores donde demasiado débil y la solución era forma a pequeños (mis motores son sólo 100 pasos/rev, que hace cerca de 25 pasos para pintar el huevo, o ~ 25 ppp...). Por el momento debido al peso del brazo largo, los pasos a menudo caminaron un paso demasiado lejos, porque no tiene suficiente energía para sostener el brazo (especialmente en las posiciones más bajas) :-(
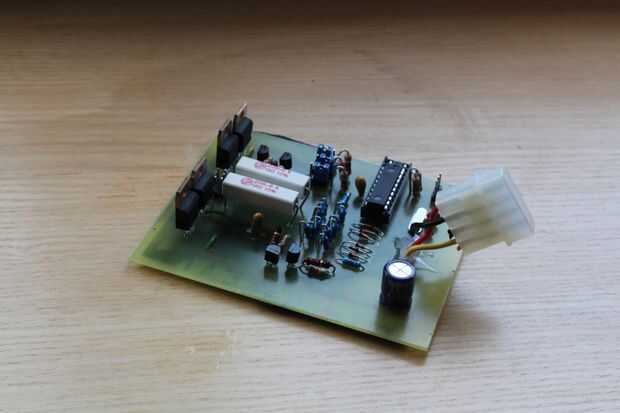
Por lo tanto decidí construido unos linisteppers (http://www.piclist.com/techref/io/stepper/linistep/index.htm) para mi los motores.
La lini paso a paso es un circuito controlador de motores PAP unipolar con hasta 18 paso a paso micro (que sería lo suficientemente bueno para esta aplicación, ~ 400 dpi). Además había planeado construir un controlador paso a paso buena para mi fresadora y mi próximo proyecto (Impresora 3d :-)) así que esto era un buen momento para construirlos. No orden, como no vivo en los Estados Unidos y envío habría sido demasiado costoso. Así que he construido una de las versiones modificadas que se adapta para PCBs echado a un lado solo, por lo que les pude grabar yo mismo.
No describo el proceso de construcción de las tablas de linistepper, como tienen gran instrucciones en su sitio. También hay un montón de instructables para hacer tus propios PCBs (yo usé el método de transferencia de tóner).
Oh sí, antes de que olvide: el linistepper utiliza un microcontrolador pic, por lo que debe tener un programador (construí un programador jdm en un tablero de pan, tomé los esquemas de circuito desde aquí: Programadores LVP no funcionarán, como usted necesita el pin de salida adicional!
Controlar los controladores paso a paso con el puerto paralelo. Uno podría también construyó un controlador usb base (en el futuro lo haré, para que yo puedo controlar desde mi netbook)
Lamentablemente microstepping no está realmente trabajando para mí ahora, y todavía estoy tratando de averiguar por qué. Creo que hay dos razones: fuente de alimentación es demasiado débil (estoy usando una fuente de alimentación atx, que significa sólo 12V, pero mis motores son clasificados 24V) y los motores son motores de fase 4 y no 2 fase como sea necesario... pero no saben la diferencia. Oh sí, y no soy muy experto en la electrónica;-).
Pero el modo de paso completo de este controlador es mucho más fuerte que la anterior, por lo tanto, que el brazo no paso demasiado lejos. La resolución es todavía mierda, pero grande de las letras es legibles en un huevo ^ ^



")







")

