Paso 6: ojos


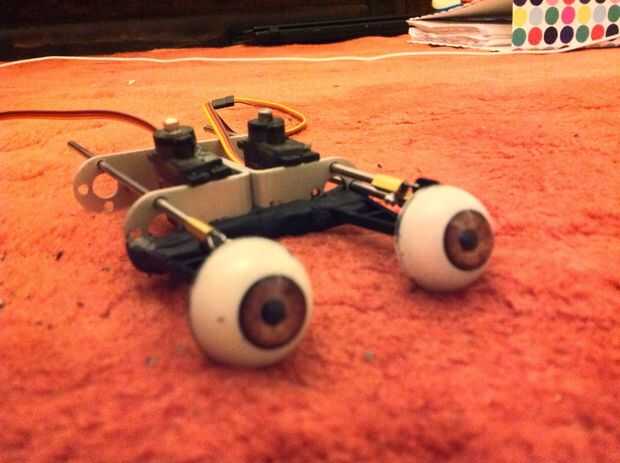








Tomar dos soportes de aluminio media U (4.1) y les de nuevo a la parte posterior del perno] [como este (4.2) hay cuatro agujeros en cada extremo del soporte. Los agujeros se utiliza para enhebrar las varillas rectas de 3 x 100 mm a través de (4.3). Para mover los ojos hacia arriba y hacia abajo tenemos que utilizar los agujeros superiores e izquierda y derecha que necesitamos utilizar el orificio izquierdo en el lado izquierdo y el orificio del lado izquierdo a la derecha (4.4). Fijar las varillas más pequeñas de 70mm (4,5) a los extremos de la parte superior (ojos arriba / abajo) e inferiores varillas (ojos izquierda / derecha) con ladrillos de latón de bloques de conexión de cable (4.6), atornille el marco junto con los tornillos suministrados. Esto forma dos grandes formas de U que se deslizan dentro y fuera de los agujeros en los dos soportes de aluminio medio U. Los ojos artificiales (4.7) y con miliput (4.8) garantizar la articulación de la toma de la bola y casquillo elemento (4.9) en el centro de la parte posterior de los ojos. Luego tomar 4 (2 para cada ojo) pequeños ojales de tornillo de latón (4.2.1) y tranquilidad en el miliput. Estos ojales deben estar nivelados con las barras que están saliendo de los dos soportes de aluminio de media superior. A cada extremo de la varilla de tomar un bloque de conector de alambre de latón y empérnela a mitad de camino en cada una de las barras de metal. Hacer un pequeños bucles usando alambre de 1mm y fije el repuesto orificio en el extremo de los conectores de latón y fije con miliput. El la parte de la bola de la bola y el zócalo común y seguro que media parte inferior de cada uno de la media de aluminio soportes U. Sujete esta parte sobre el soporte utilizando negro plástico termo (4.2.4). Colocar las rótulas juntos y alambre de 1mm por cada uno del latón sin ojos, cerrar los orificios con unos alicates y apretar el alambre de 1mm (con precaución) para formar un ajuste ceñido. Uso miliput en las partes nombre de los conectores de latón y lazos de alambre de 1mm para asegurar su lugar. Tomar dos micro servos y sujete boca abajo a unos de otros por sus bases usando pegamento. Añadir soporte plástico servo brazos toman un cable de 3mm y cortaron dos piezas en tiras de 4cm. Uno de los extremos del lazo y montar a través de uno de los agujeros en el brazo del servo y el otro extremo alrededor de la parte posterior del soporte U gran del lazo de control los ojos arriba y abajo / izquierda y la derecha. Este seguro en su lugar a cada lado con plástico termo (permite el lazo para girar con el brazo del servo pero no se mueven arriba y abajo de la barra metálica). Conecte el servo dos en la parte superior de la espalda del robot con miliput (ver imagen). Esto completa el mecanismo del ojo. Ver video de prueba material.
 Robo-Animatronic (C.Strathearn MRes Animatronics UoH 'ADA' 2016)")



")


")


")


