Paso 5: La conexión de mando

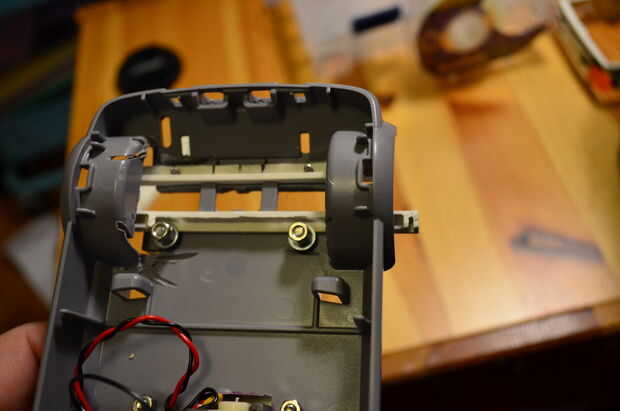

Hice algunas investigaciones en línea y finalmente encontrado el siguiente enlace simple: dos puntales de plástico largo, delgados, paralelos, el delantero fijadas y el posterior libre deslizar a izquierda y derecha. Cada rueda se encuentra en los extremos de estos puntales, en una brida (corte de chapa) que se atornilla a la parte inferior de los extremos de un par de puntal. Cuando la parte posterior del puntal diapositivas a la izquierda, golpea con el pie hacia fuera la parte posterior de la rueda izquierda y simultáneamente se tira en la parte posterior de la rueda derecha; y viceversa la otra dirección.
Cuando lo probé, aunque, finalmente comprendí que simplemente tenía que parten desde el diseño original del carro. Las ruedas son bastante amplias, y los girando incluso el pedacito más pequeño causó las ruedas al rozar el interior de los pozos de rueda. Así, tan feo como lo era, decidí que tenía que mover las ruedas de los pozos de rueda completamente con el fin de conseguir que gire lo suficiente. Lo hice utilizando struts más. Odiaba hacer esto grande de un cambio a la apariencia original del carro, pero no tuvo otra opción.
Después de que había cortado y montado todo esto, me enteré sobre la Geometría de dirección Ackerman, que utiliza en forma de L pieza para girar las ruedas, con eficacia poner cada rueda delantera en un radio de giro algo diferente mientras gira. Hubiera sido un diseño superior, pero realmente no quería reconstruir el frente del acoplamiento de dirección. Además, mi carro no va realmente nunca lo suficientemente rápido como para a la materia. Si tuviera que hacerlo, sin embargo, yo intentaría implementar el diseño de Ackerman.
Ahora el problema era conectar el servo a la conexión de mando.






")


")



