Paso 3: Conexión de los Servos para el Arduino
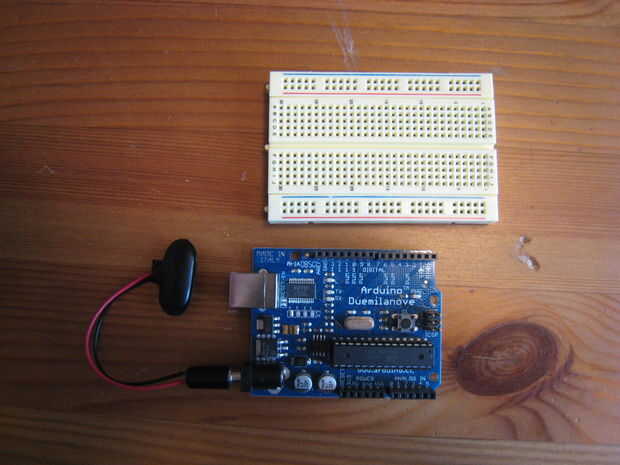
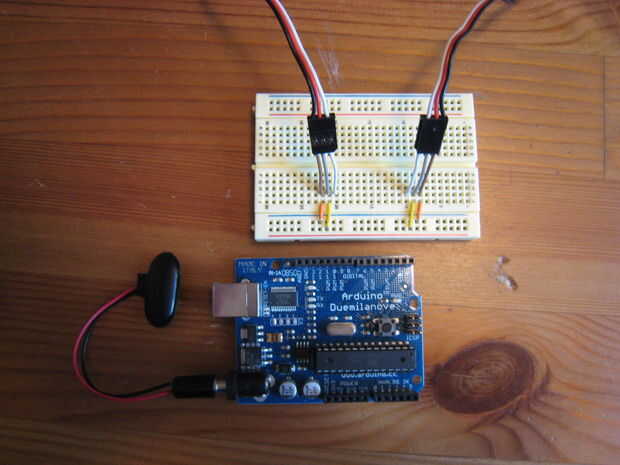
1. la primera cosa a hacer cuando se configura la placa solderless es establecer la tierra (GND) y energía (+ 6V) para los servos. Opté por usar las dos tiras largas en la placa que sería más cercana a la Arduino.
2. una vez que se identifican las líneas de tierra y poder conectar la tierra de la placa Arduino a la franja de tierra en el protoboard sin soldadura. No conecte todavía el poder a la placa sin soldadura.
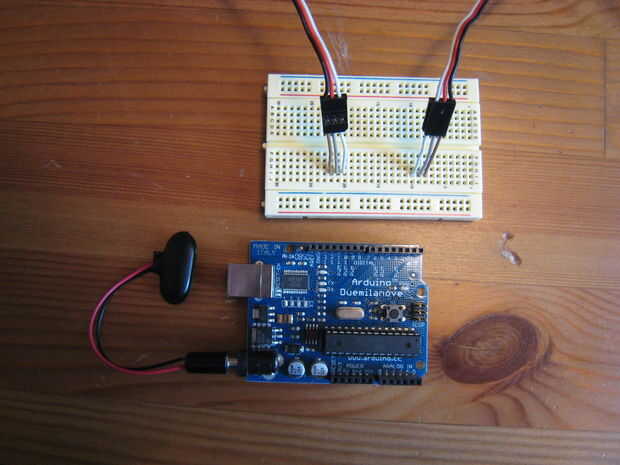
3. cada servo tiene tres cables que salen de ellos. Mina tiene un cable negro, rojo y blanco para cada uno. El negro es para la tierra, el rojo es para la energía y el blanco es el alambre de control. Cortar tres cables de puente para cada servo del mismo tamaño (hasta 6 en total).
4. Conecte los cables de puente hasta el final de los cables del servo y luego cada servo a la placa sin soldadura.
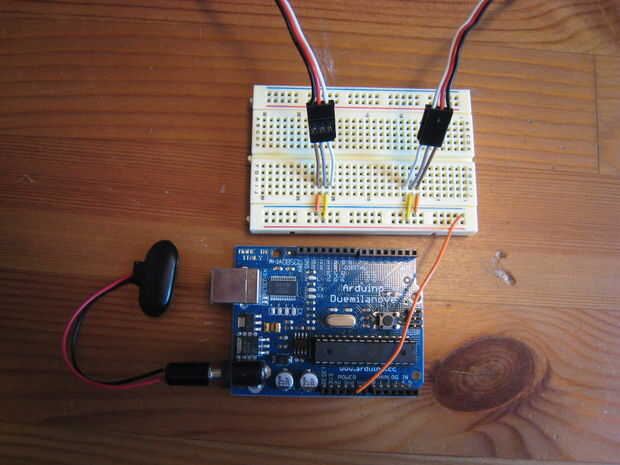
5. ahora utilice puentes para conectar la tierra y el poder de cada servo a la tierra y el poder de la placa sin soldadura.
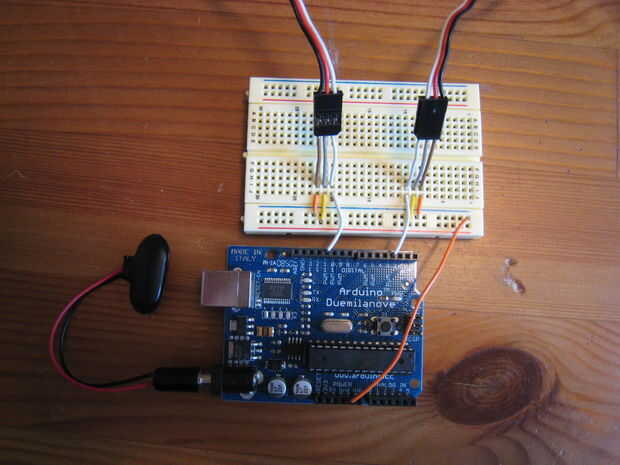
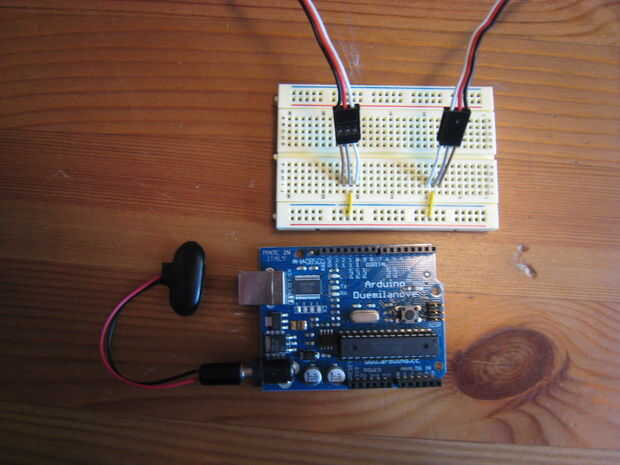
6. ahora Conecte los cables de control de cada servo a Arduino. Conecte el servo izquierdo a la salida digital (PWM) 3 y el servo derecho a salida digital (PWM) 11.
7. por último, conecte la tierra y el poder de las baterías 4AA a la tierra sin soldadura breadboard y el poder. No se alarme si los servos pone en marcha cuando su Arduino no tiene poder o aún no se programa.
8. Utilice el código ahora debería poder ejecutar los motores en las direcciones adelantadas, atrás, izquierdas o derecha utilizando las funciones incluidas.








")




")