Paso 5: Integrar el botón de encendido/apagado
Como nota, se dará cuenta que se me quitan los servos de la placa sin soldadura para la mayoría de mis fotos. Esto sólo ayuda a la imagen más clara cuando estoy mostrando diferentes pasos.
1. para comenzar, desconecte la alimentación de los servos antes de realizar más trabajos. Recuerda hacer esto cada vez que añades algo a este proyecto.
2. ahora puede ser capaz de convertir tu robot y en lugar de tener el robot inmediatamente pone en marcha cuando se conecta la alimentación.
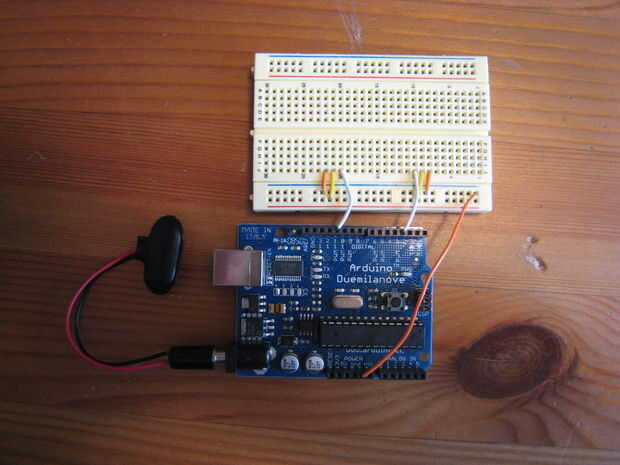
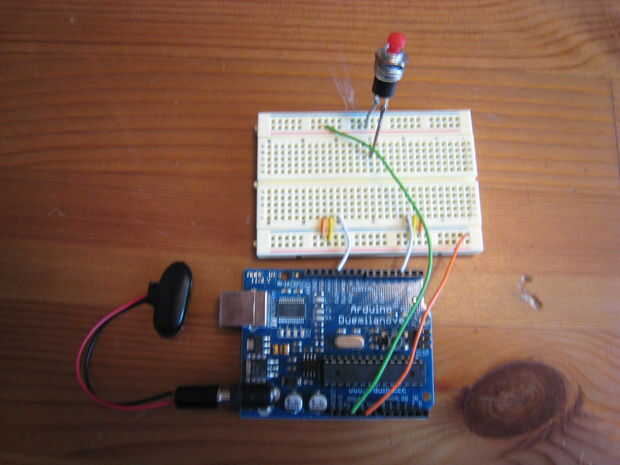
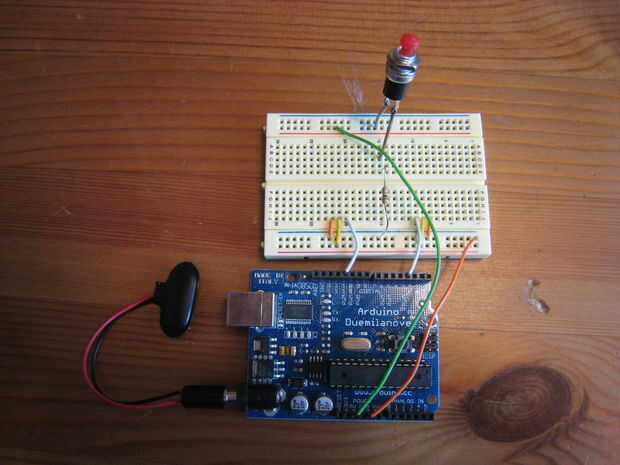
3. identificar una franja en el lado opuesto de la placa sin soldadura a ser potencia de encendido/apagado botón (y más tarde los sensores).
4. utilizando un cable puente largo conectar la alimentación (+ 5V) de Arduino en la regleta que sólo identificado.
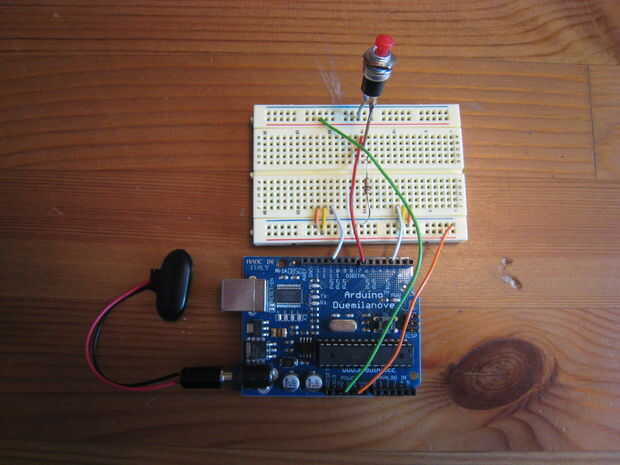
5. Conecte dos cables de puente al interruptor momentáneo y conecte un extremo en el (+ 5V) poder
6. Enchufe el otro extremo del interruptor momentáneo en una franja más pequeña en el centro de la placa sin soldadura.
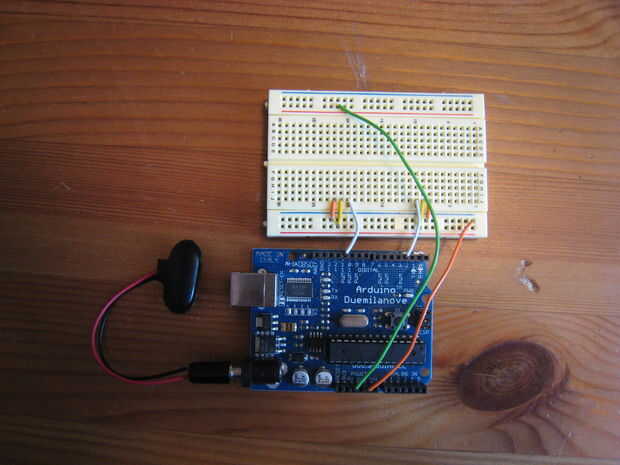
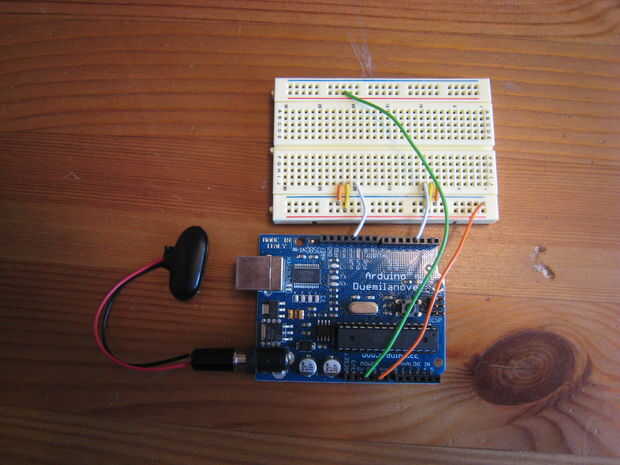
7. de esa misma franja conectar una resistencia de 10K ohm a la tira y el otro extremo en la tierra
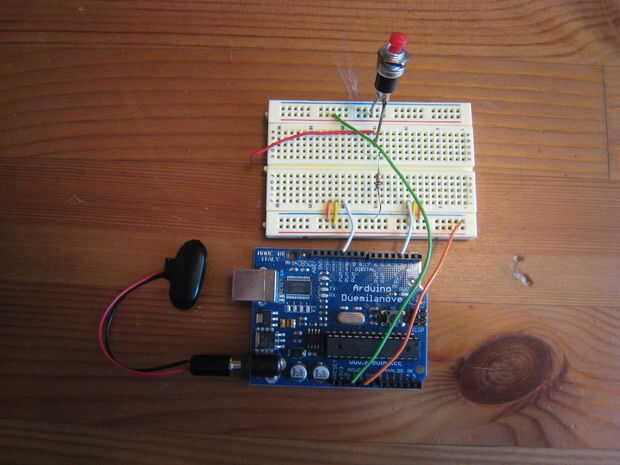
8. por último, conecte un cable de la tira con el interruptor y la resistencia en un extremo y colocar el otro extremo en la entrada digital 7 en el Arduino.
9. ahora, con el código debe ser capaz de utilizar el botón para encender y apagar el robot. Si utilizas el código con el LED (salida digital 13) verá la vuelta a bordo del LED encendido y apagado con el robot. Esto es una gran manera de probar el código de Arduino si usted tiene el poder de los motores desconectados.








")




")