Paso 7: Integración de los sensores de luz
¿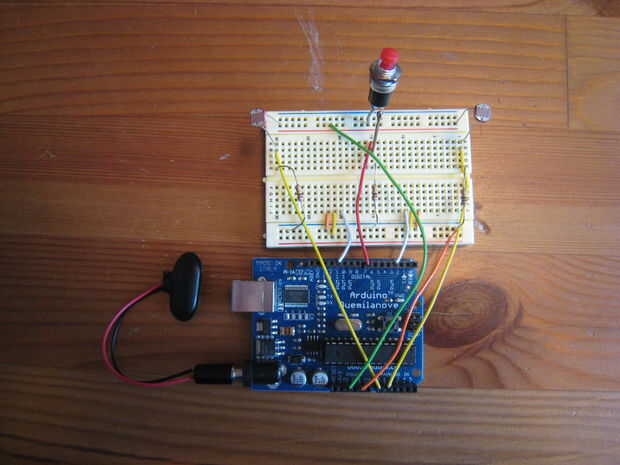
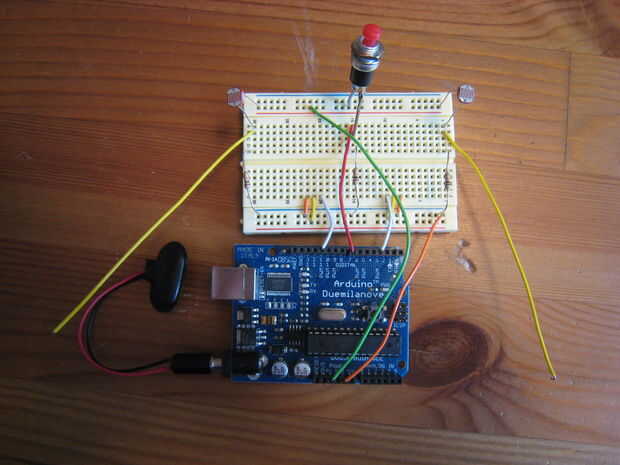
1. de nuevo, desconecte la corriente de los motores servo antes de hacer este paso
2. la instalación de los sensores de luz se hará dos veces. Es casi la misma configuración exacta como el interruptor momentáneo. En realidad, es la misma configuración, pero esta vez usará el sensor de luz (fotorresistencia) en lugar de un interruptor momentáneo.
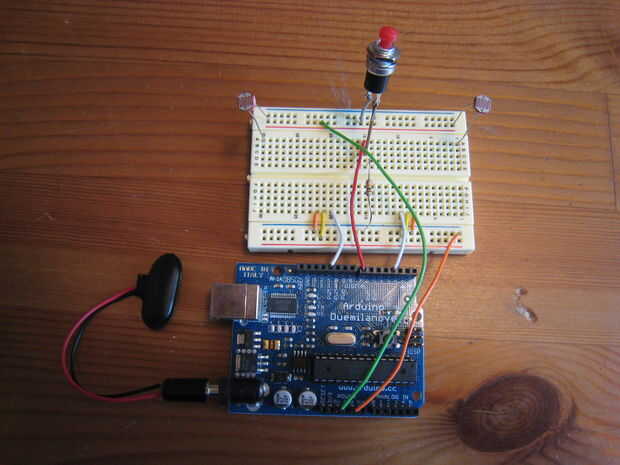
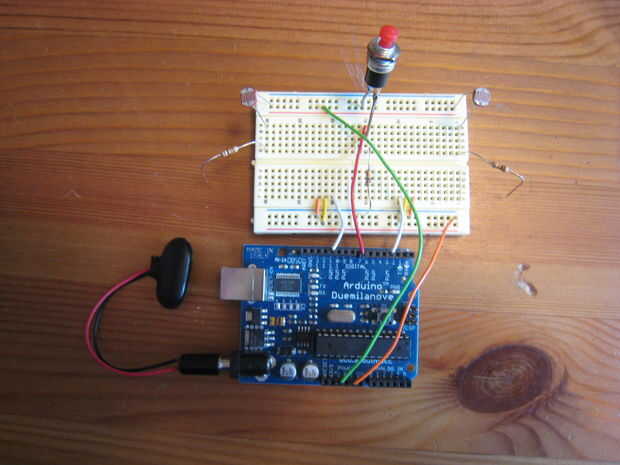
3. porque este robot utilizará los dos sensores de luz para escoger una dirección para conducir se recomienda que configure cada sensor de luz en los lados opuestos de la placa sin soldadura o tan distantes como sea posible.
4. Conecte un extremo de un sensor de luz para la (+ 5V) la energía de línea y el otro extremo en una pequeña franja en el centro del tablero.
5. Conecte una resistencia de ohmio 10 k eso mismo tira y el otro extremo a tierra
6. ahora Conecte un cable de puente desde la pequeña franja (donde la fotorresistencia y regular resistencia están conectadas) y conecte el otro extremo a una entrada analógica.
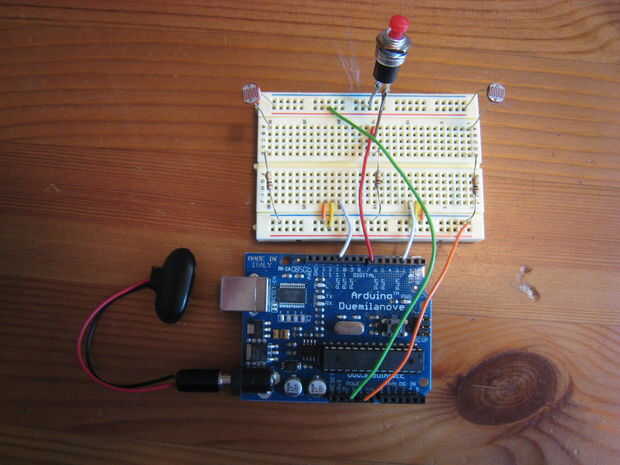
7. Conecte el sensor izquierdo entrada analógica 0 en el Arduino y el sensor derecho a entrada analógica 1.
8. ahora podrá utilizar los sensores de luz para mover los servos.








")




")