Paso 12: Configuración y Software.

El MicroSlice utiliza GRBL para Control de movimiento.
GRBL está escrito específicamente para el uso con el Arduino UNO R3.
El MicroSlice utiliza una versión modificada de GRBL. En este caso para poder utilizar el MicroSlice para grabar imágenes tenemos que utilizar una versión de GRBL que es capaz de proporcionar una salida PWM para el módulo de Control del láser. Planeo usar la última versión GRBL 0,9 g que soporta la salida PWM a través de una velocidad variable.
Sin embargo durante las pruebas descubrí que el movimiento función de planificación de GRBL no permite cambios de velocidades del husillo mientras la máquina está en el trabajo de alimentación tarifa y el cabezal de corte es más lento mientras que la operación se lleva a cabo. Esto significaba que era muy difícil conseguir un gradiente en el grabado. En resumen el rayo era a plena potencia, o apagado. Al parecer esta es una característica de seguridad de G-Code.
Cosas no buscaban buenas nueva imagen grabado capacidades que había planeado para el MicroSlice...
.... Pero yo estaba en una conversación de correo electrónico con las grietas sobre en PicEngrave.com, habían explicado a mí el problema con la función de eje PWM, sabían de alguien que había permitido PWM en el eje z (el eje z es parte de la planificación del movimiento y la velocidad de avance es sin modificaciones) y de la persona en cuestión había escrito un primer instructivo Premio de ganar sobre todo | CNC láser para impresión de imágenes y grabado - 2 Shapeoko base.
Perfecto!
GRBL modificado con modo del Laser el MicroSlice es capaz de tanto vector grabado y grabado raster.
Entonces, ¿cómo podemos hacer GRBL Laser modo trabajar con lo MicroSlice?
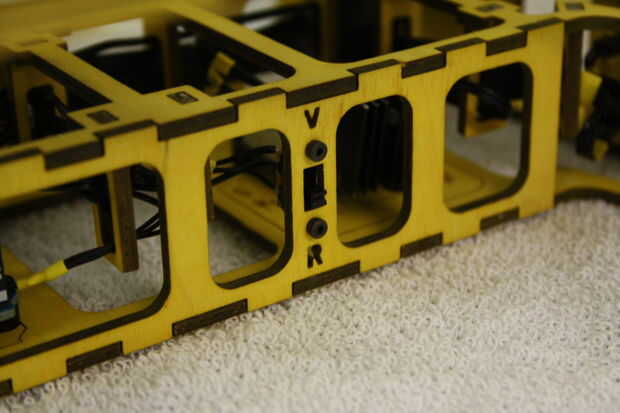
Hace algunas semanas había alterado los diseños MicroSlice para poder montar un pequeño interruptor deslizante SPDT para la cubierta inferior. Con esta nueva versión de GRBL será posible intercambiar entre los modos Vector y Raster con el toque de un interruptor.
Tendremos que quitar el eje z desde el ciclo autoguiados hacia el blanco como el MicroSlice no tiene un eje z. Podemos hacerlo descargando el código fuente y editar unas pocas líneas en el archivo config.h.
Usted puede aprender cómo editar el archivo config.h y retire el eje z desde el Software y la configuración de la MicroSlice V1.
He adjuntado una versión pre-compilada del modo GRBL láser. HEXAGONAL con el eje z de ciclo autoguiados hacia el blanco. Descargar previamente compilado. HEXAGONAL de la V1 ya no tiene modo de Laser.
Ahora necesitamos flash el HEX para el Arduino. Usar XLoader es muy sencillo de utilizar.
Con el Arduino flasheada podemos configurar GRBL. Puede que necesite instalar el IDE de Arduino , ya que contiene los drivers USB necesarios por la ONU.
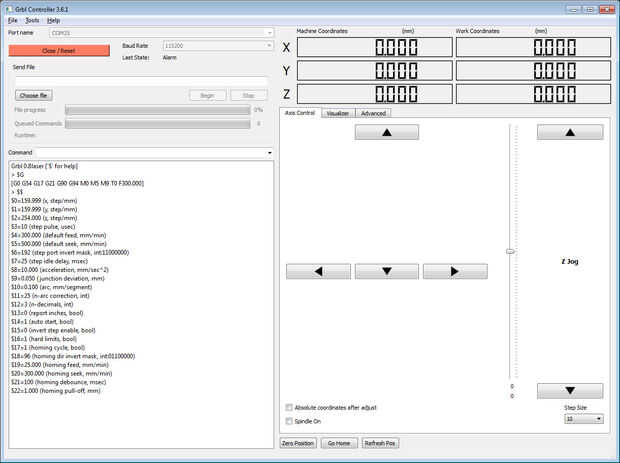
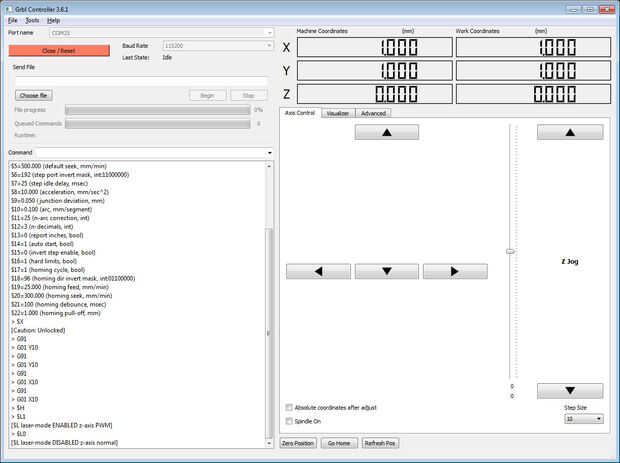
Hay muchos remitentes de G-Code y prefiero utilizar GRBL controlador de ZapMaker. Es multiplataforma y funciona así en la mayoría de sistemas operativos.
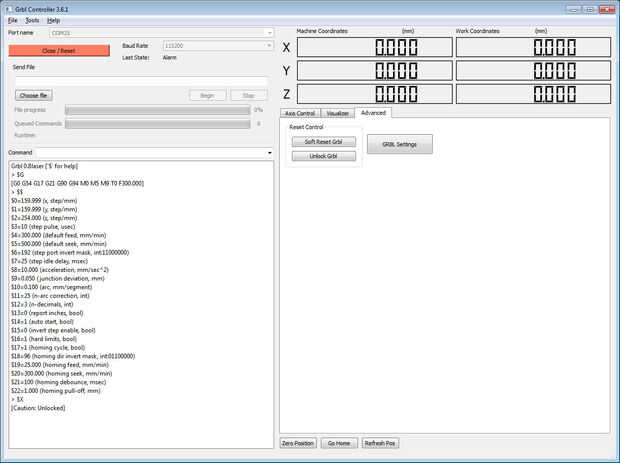
Después de descargar e instalar la aplicación abierta GRBL controlador, seleccione el puerto COM correspondiente en la lista desplegable, establezca la velocidad de baudio a 115200 y haga clic en abrir. GRBL regulador intentará conectar con GRBL.
Si Grbl regulador puede establecer una conexión con GRBL usted será presentado con un texto en el cuadro de mensajes; en la pantalla debe ser Grbl0.8laser. Entonces habrá una carga de valores $. Estos valores son los valores predeterminados para GRBL.
He editado el código fuente y compilado GRBL con la configuración predeterminada para el MicroSlice, debería estar listo para ir, pero necesitaremos un hacer pocos cheques primero.
En primer lugar | Desbloquear GRBL con $X, o abrir la pestaña avanzado y haga clic en el botón de Desbloqueo Grbl , volver a la ficha de Control de eje cuando haya terminado.
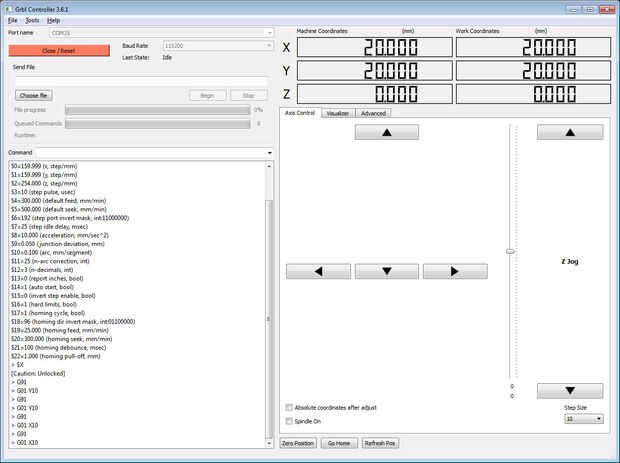
2 | Controlar que el desplegable de Tamaño de paso es de 10, haga clic en una de las flechas de dirección. El MicroSlice debe moverse en la dirección de la flecha. Si esto no sucede y, por lo contrario necesita girar el tapón del motor correspondiente donde conecta con el EadyDriver.
3 | Haga clic en la flecha de nuevo para asegurarse de que se mueve en la dirección correcta.
4 | Repita con el otro eje.
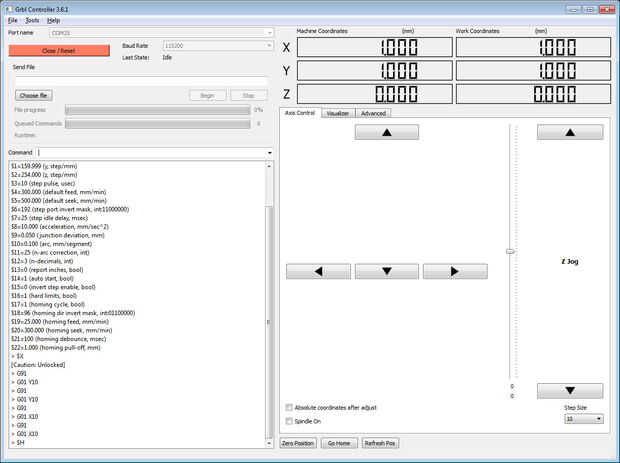
5 | Para ejecutar la secuencia de homing y verificar que los topes funcionan correctamente escriba $H en el cuadro de comando. El cabezal de corte debe avanzar hacia la esquina inferior izquierda y parar. Hay un vídeo de la secuencia de homing aquí | YouTube. Si esto no funciona necesita problemas para disparar la falla.
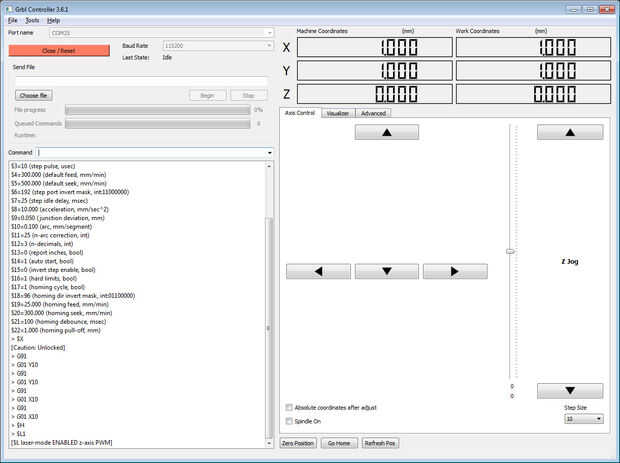
6 | Finalmente podemos comprobar que el modo láser permite correctamente. Tipo $L1 en el cuadro de comando y presione Entrar. Si funciona un mensaje se mostrará en la ventana diciendo así. Para deshabilitar el nuevo tipo $L0.











