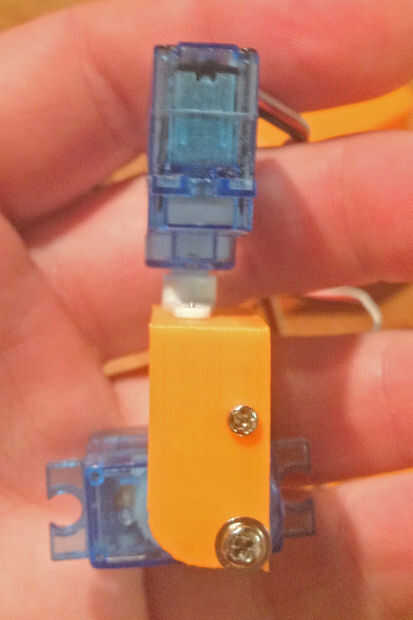
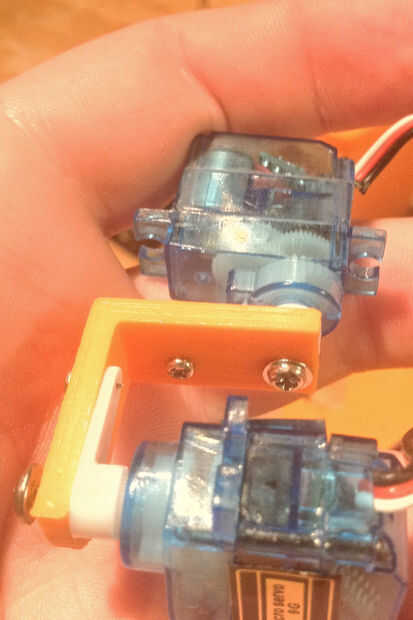
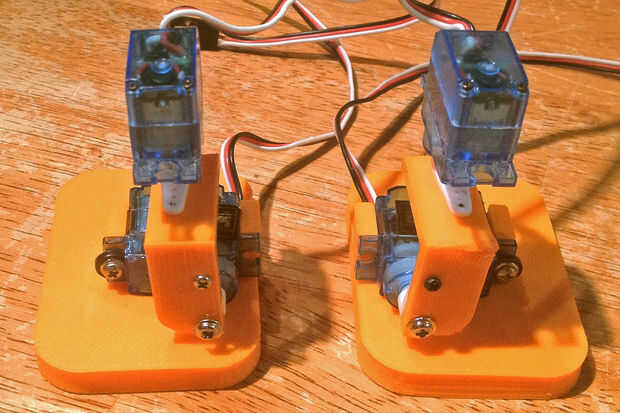
Paso 2: montar las piernas.

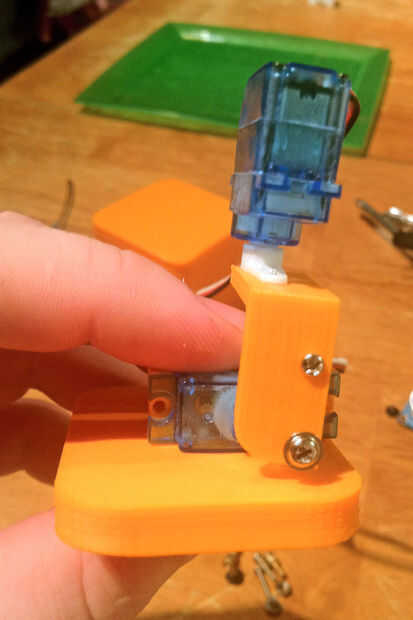
mi robot ya estaba montado y desmontado para este instructable... Esto es donde fallan y no podía encontrar mi pequeño destornillador para acabar completamente con las piernas. he proporcionado tantas fotos como pueda.
Paso 1: Centro de los servos.
para arduino conectarse el cable de señal del servo D9 y el servo pos y neg 5V y Gnd de arduino.
Abra el IDE de arduino y escribe esto en
#include
Servo servo;
void setup()
{
servo.Attach(9); se conecta el servo al pin digital 9
}
void loop()
{
myservo.Write(90); dice el servo a la posición central
}
hacer para cada servo de pierna y montar como en las fotos












")