Paso 6: Construir el prototipo - cableado Arduino, la DRV-8835 controlador Dual de Motor y motores
Montar el controlador de Motor Dual Carrier
- Soldadura de cabezales suministrados con el chip DRV8835 Dual Motor conductor transportista al portador.
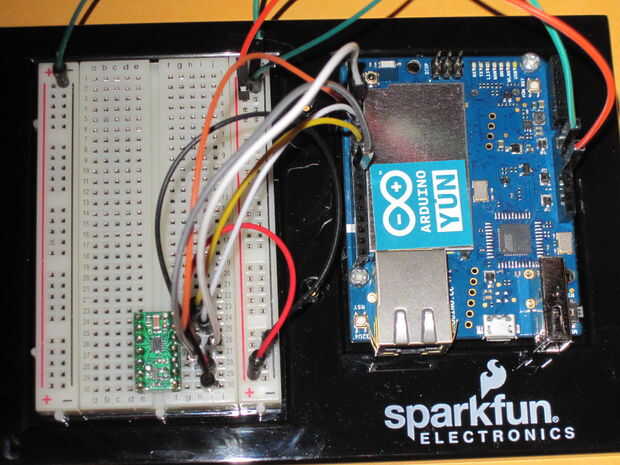
- Conecte el conductor del Motor en un protoboard.
Conectando Arduino a la DRV8835
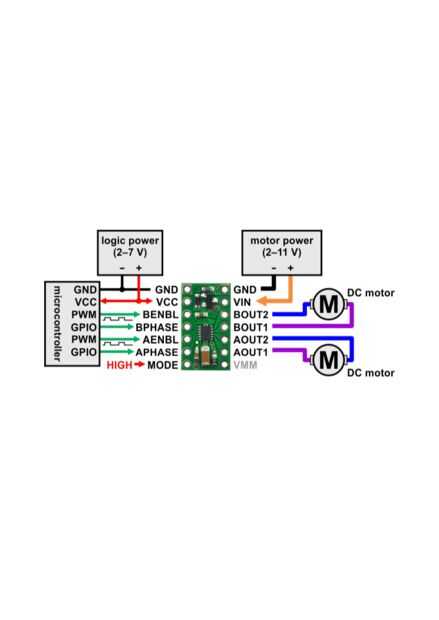
Utilizando el diagrama en la primera pantalla, los pernos del lado izquierdo de la DRV8835 están conectados con el Arduino.
El DRV8835 controla 2 motores. Hay 2 pins de control para cada motor.
Los pernos de "xENBL" controlan la velocidad del motor. Estos pernos deben conectarse a un pin PWM (Pulse Width Modulation) de Arduino.
- Conecte AENBL al pin digital de Arduino 5.
- Conecte BENBL al pin digital de Arduino 3.
Los pernos de xPHASE controlan de la dirección del motor.
- Conecte APHASE al pin digital de Arduino 7.
- Conecte BPHASE al pin digital de Arduino 4.
El pin de modo controla el modo de funcionamiento de la DRV8835.
Conectarse modo pin digital de Arduino 8.
Conectar la energía al lado de Arduino de la DRV8835
- Conectar el GND (masa) a la tierra del Arduino (pernos o GND en el conector de alimentación de Arduino ).
- Conectar VCC en el pin de alimentación de 5V de Arduino .
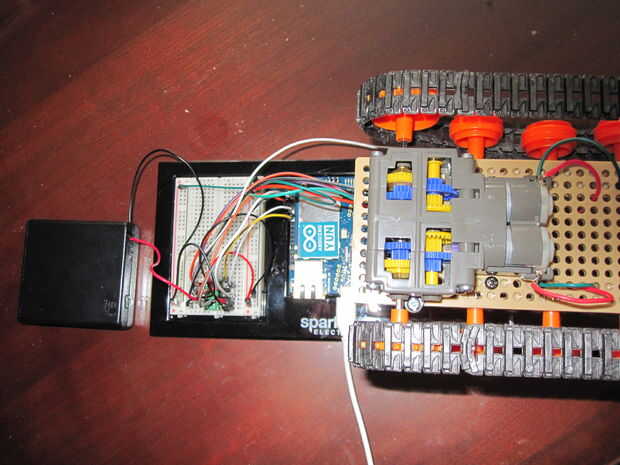
Conectar los motores a la DRV8835
Mirando el diagrama en esta página, los pernos del lado de mano derecha de DRV8835 están conectados a los motores.
- Conecte el cable de la parte superior desde el primer motor (escoge cualquiera) a AOUT1.
- Conecte el alambre inferior del primer motor a AOUT2.
- Conecte el alambre superior del segundo motor a BOUT1.
- Conecte el cable inferior del segundo motor a BOUT2.
Conectando el lado del Motor de los 8835
- Lugar 4 pilas en el portapilas.
- Conecte el cable positivo al VIN
- Conectan los terrenos de los lados del Arduino y Motor.



")









")