Paso 5: Programación de arduino y prueba por primera vez!


Para la programación por favor separar 4pins de módulo bluetooth de arduino y sube el archivo a tu arduino y asegúrese de seleccionar arduino mega 2560 (si estás usando arduino mega) y asegúrese de seleccionar el puerto correcto.
HAGA CLIC AQUÍ PARA DESCARGAR EL ARCHIVO
(si no está utilizando arduino mega fácilmente puede realizar cambios en el programa, he añadido muchos comentarios archivo programación que te guiará, si todavía tienes problema que siempre me puedes pedir)
Después de la carga exitosa, conectar la batería para encender hbridges, mantenga su robot en han, abrir el serial monitor del IDE de arduino, establecer la velocidad en baudios de monitor serial a 9600 (la velocidad en baudios de origen y de destino debe ser mismo)
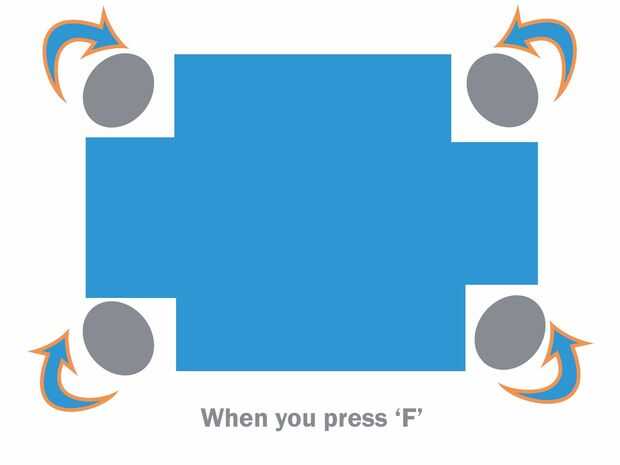
Ahora, tipo 'F' y presiona Enter, deben funcionar todos los 4 motores. Dirección de ruedas pulsando 'F' se muestra en la figura 3 de este paso.
Si cualquier dirección del motor no es igual como se muestra en la figura 3 pines interruptor entonces acuerdo siguiente:
Si se invierte motor 1 >> pin intercambio 22 y 23
Si se invierte el motor 2 >> pin intercambio 28 y 29
Si se invierte el motor 3 >> pin intercambio 36 y 37
Si se invierte motor 4 >> pin intercambio 44 y 45
consulte otros personajes como:
B para retroceder,
L para la izquierda,
R para el derecho,
G para la izquierda hacia adelante,
Para el delantero derecho,
H para la izquierda atrás,
J derecho al revés,
S o D para parada
0 o 1 o 2 o 3 para la lucha contra las agujas del reloj (S o D no trabaja para salir de esto, presione 4, 5 o 6)
4 o 5 o 6 neutro (para desactivar hacia la izquierda o hacia la derecha)
7 o 8 o 9 o q de las agujas del reloj (S o D no trabaja para salir de esto, presione 4, 5 o 6)
w o W o u o U para patear la bola (después de pulsar esta la pistola de cerradura de puerta de coche debe ejecutar o salir, o al menos mover un poco, si es que sale y va en aquel entonces sus bellas! si no intercambio de puentes en el pin 50 y 51 de arduino mega)
TODO hecho, ha pasado todas las pruebas!
ahora conectar el bluetooth al igual que en el paso anterior,
VCC de BT >> 5v de arduino
TIERRA de BT >> GND de arduino
TXD de BT >> RX0 de arduino
RXD de BT >> TX0 de arduino













