Paso 1: Instalación del Software

Una vez que tenga el hardware necesario, tienes que instalar el siguiente equipo de software en tu Windows 7 (o posterior).
1. descargar MatLab R2011b o posterior
2. Descargar Microsoft Visual Studio 2010 Express Edition (VC ++)
- Disponible en http://www.microsoft.com/visualstudio/eng/download...
3. descargar OpenNI
- Disponible en http://www.openni.org/Downloads/OpenNIModules.asp...
- Seleccionar, descargar e instalar: OpenNI binarios estables de OpenNI estable construir para Windows desarrollo edición y seleccione su sistema (32 bits o 64 bits)
- Seleccionar, descargar e instalar: OpenNI compatible con Middleware binarios estables de PrimeSense NITE estable construir para Windows y seleccione su sistema (32 o 64 bits)
- Seleccionar, descargar e instalar: OpenNI compatible con Hardware binarios-estable-PrimeSensor módulo estable construir para Windows y seleccione su sistema (32 o 64 bits)
4. descargar Simulink soporte para Kinect
- Disponible en http://www.mathworks.com/matlabcentral/fileexchang...
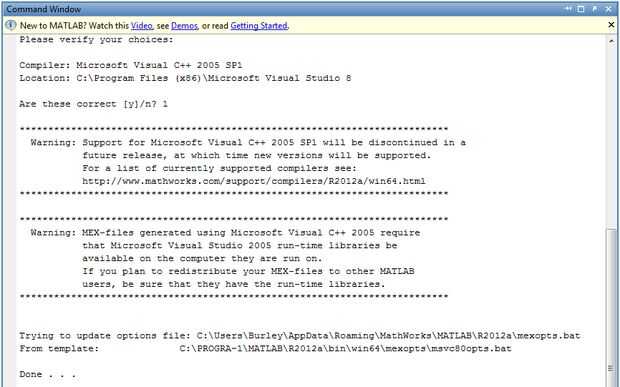
5. configurar el compilador de C de MatLab
- Tipo mex-setup en el símbolo del sistema de MatLab para seleccionar la configuración de compilador y seleccione Microsoft Visual Studio 2010 Express Edition como el compilador utilizando las instrucciones en pantalla.
Puede obtenerse más información sobre cómo configurar el compilador de C de MatLab: http://www.mathworks.com/help/matlab/ref/mex.html
6. Instale el soporte de Simulink para Kinect
- Instale el soporte de Simulink para Kinect
- Reinicie su PC
- Descomprimir la carpeta de Support de Simulink y guárdelo en un directorio de su elección
- Abra y ejecute slkinect/setup_openni.m. Si todo está instalado correctamente, un CMEX archivo (sfun_nid.mexw32)_
- Jugar con los modelos de demostración diferentes en el directorio slkinect y muestras. Tenga en cuenta que la matriz de micrófono de Kinect y los demos de Sensor ángulo no funcionan con el SDK de OpenNI, pero no será necesario.
")



")



 con pfodApp")



