Paso 2: Microsoft Kinect y Rhino XR-4 brazo robótico




Microsoft Kinect
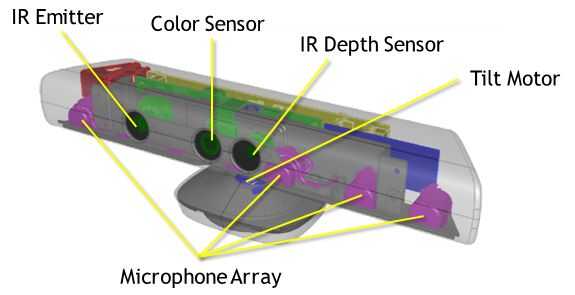
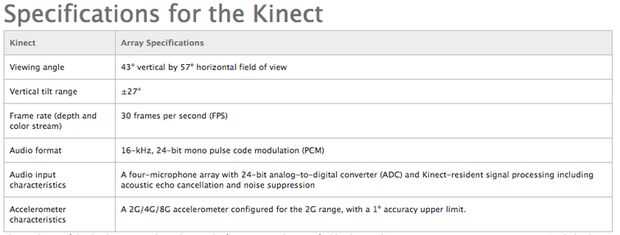
El Kinect de Microsoft es un dispositivo físico que contiene cámaras, un arreglo de micrófono y un acelerómetro así como una tubería de software que procesa datos de esqueleto, profundidad y color. El Kinect Microsoft contiene:
- Una cámara RGB que almacena tres datos de un canal en una resolución de 1280 x 960. Esto permite capturar una imagen en color.
- Un emisor de rayos infrarrojos (IR) y un sensor de profundidad de IR. El emisor emite haces de luz infrarrojas, el sensor de profundidad Lee que la IR vigas refleja atrás al sensor. Los rayos reflejados se convierten en información de profundidad la distancia entre un objeto y el sensor de medición. Esto permite capturar una imagen de profundidad.
- Un micrófono multi-array, que contiene cuatro micrófonos para capturar sonido. Porque hay cuatro micrófonos, es posible grabar audio, así como encontrar la ubicación de la fuente sonora y la dirección de la onda de audio.
- Un acelerómetro de 3 ejes configurado para un rango de 2G, donde G es la aceleración debido a la gravedad. Es posible utilizar el acelerómetro para determinar la orientación actual de la Kinect.
Puede encontrarse más información acerca del Microsoft Kinect aquí.
Brazo robótico de la XR-4 Rhino y Mark IV controlador
El brazo robótico de la XR-4 Rhino con el controlador de Mark IV se deben establecer según las instrucciones del brazo robótico y el controlador. El Mark IV controlador debe conectarse a la computadora mediante una interfaz RS - 232C.
Más información sobre el rinoceronte XR-4 y Mark IV controlador puede encontrarse en: http://kinectkontrol.weebly.com/rhino-xr-4.html
")



")



 con pfodApp")



