Paso 4: Descargue los archivos adjuntos de modelos de Simulink y MatLab

Con el fin de transformar el sistema de coordenadas de la Kinect Microsoft en el sistema de coordenadas de la XR4 de Rhino, control de la XR-4 Rhino de Matlab y automatizar el brazo robótico con visión desde el Microsoft Kinect he código de varias secuencias de comandos de Matlab y un modelo de Matlab para su conveniencia. Deben descargar los archivos en el directorio siguiente: slkinect/muestras/win
Los archivos están disponibles para su descarga aquí:
http://kinectkontrol.weebly.com/downloadable-files...
Microsoft Kinect
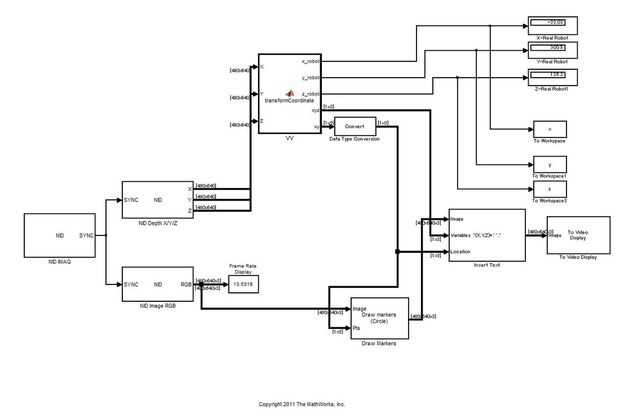
markerlocator.MDL
El archivo es un modelo en Simulink, que puede ser fácilmente reconstruido. Cabe señalar que dentro de la función de TransformCoordinates, existen tres ecuaciones. Cada ecuación se refiere a la transformación, traducción y el eje de coordenadas de Kinect para el eje de coordenadas de la XR-4 específico de mi configuración de. Estas ecuaciones se basan en información muy específica sobre el diseño del Kinect y la XR-4 y se explicó aquí: http://kinectkontrol.weebly.com/kinectrhino.html
Rhino XR-4
Main.m
Este es el script principal y fue escrito para controlar el brazo robótico de Rhino XR-4. Fue escrito para alcanzar, agarrar, recoger un objeto colocado al azar, coloque hacia abajo, volver a la base, y coloca el símbolo del sistema ejecute el usuario si desea continuar con el otro para elegir otra al azar objeto.
initxr4.m
Este archivo inicializa la conexión entre la computadora y el brazo robótico de XR-4 Rhino y guarda la conexión en serie como la variable'. Contiene la información necesaria para iniciar la conexión en serie. Este archivo también se supone que se usa el COM1 serial, si no estás usando COM1 cambiar el puerto serie correcto.
movexyzat.m
Este archivo mueve a la garra de la XR-4 a la ubicación especificada (x, y, z) en mm en relación con el origen de la XR-4 Rhino. La 'a' se refiere al ángulo de la pinza en relación con el eje z del sistema de coordenadas XR-4 y la ' t ' se refiere al ángulo de la pinza en relación o del eje x del sistema de coordenadas XR-4.
sendcmd.m
Este archivo envía comandos a la XR-4. Estos comandos fueron obtenidos del manual de la XR-4. Algunos comandos incluyen 'TH' que la XR-4 para entrar en modo Host, que le permita controlar desde el ordenador y 'HH', que narra la XR-4 para entrar en hogar duro. Hogar duro permite la XR-4 a partir de una referencia más precisa.
waitxr4.m
Este archivo le dice a la XR-4 para esperar un período de tiempo determinado.
closexr4.m
Este archivo es muy importante para cerrar y eliminar la conexión del puerto serial.
")



")



 con pfodApp")



