Paso 3: montaje






En este paso, demuestro cómo montar el cuerpo del robot. Voy a empezar con el montaje de la pierna.
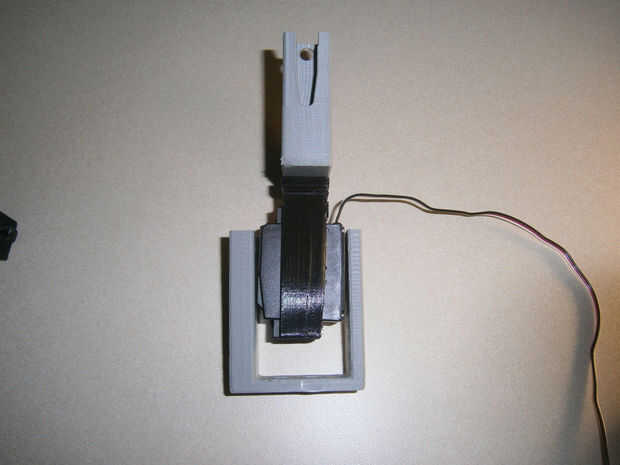
Primero tome la articulación y fíjelo al soporte de servo superior.
Después con éxito han hecho esto, tomar un servo e introducirlo en el empalme con la spline de la salida más cercana al soporte y la tira hacia la izquierda.
Recuerde centrar el servo por tener el cuerno del servo hacia abajo el servo cuando está a 90 grados. Esto asegurará que usted conseguir los resultados deseados cuando se ejecuta el bosquejo.
A continuación, tomar el soporte servo inferior y alinee la spline de servo con el orificio en el soporte e introducirlo a través de él. Ahora todo lo que tienes que hacer es adjuntar un cuerno del servo a la spline y atornillarlo.
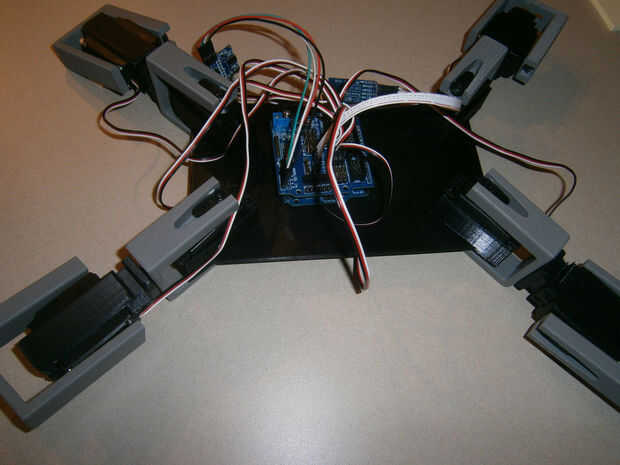
Hacia la base, tome la base del robot y caben cuatro servos en las ranuras de cuatro servo de la base, con la parte del servo que tiene la ranura de salida más cercano al centro de la base. Fije el soporte del servo superior a uno de los servos en la base, con la ranura de salida del servo de la base apuntando hacia arriba, coloque un cuerno del servo en la base y con éxito han montado una pierna. Repita este proceso para las tres piernas.
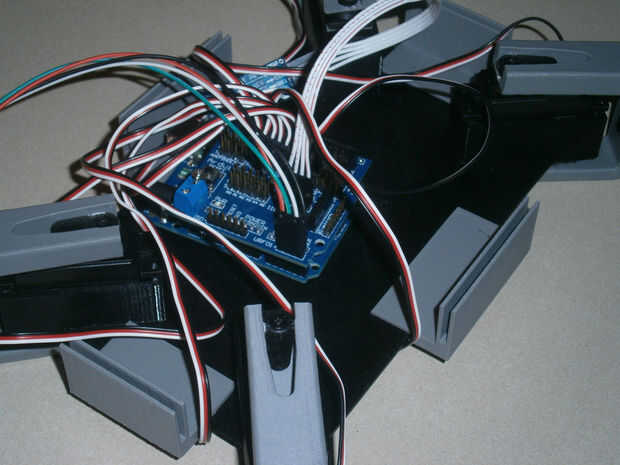
A continuación colocar las articulaciones inferiores de lado a los lados del robot y la parte frontal inferior y juntas de nuevo al frente y la parte posterior del robot respectivamente.
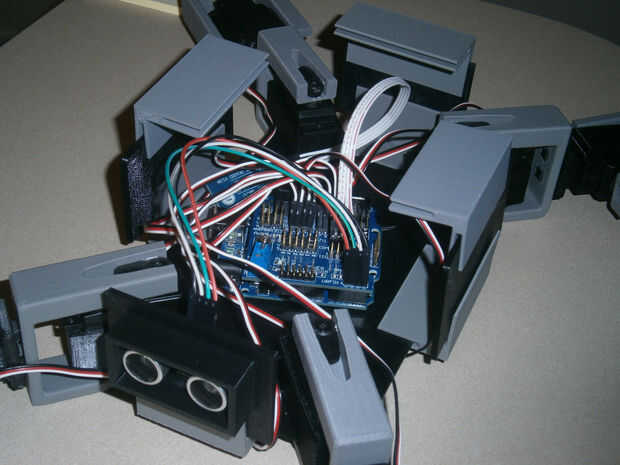
Ajuste el sensor de ultrasonidos para la parte frontal del robot en la ranura señalada para él y montar esta cara en el empalme frontal. Ahora puede ajustar el lado y parte posterior se enfrenta a sus respectivas juntas.
Por último, colocar la tapa en la parte superior y juntas y ajuste a la cara y cara posterior y se realizan con la Asamblea.










![[DIY] Araña Robot (robot de Quad, cuadrúpedo)](https://foto.askix.com/thumb/170x110/c/ee/ceede9295111d43b4a1ba30223f7f41c.jpg "[DIY] Araña Robot (robot de Quad, cuadrúpedo)")


