Paso 15: Alambre para los guantes




Como si construir un traje de super héroe desde cero no es lo suficientemente difícil, tenemos que agregar electrónica a él. Pero ¿qué es un hechicero Supremo sin un poco de magia? Si usted quisiera, sin embargo, puede saltarse este paso y mantener las cosas simples (como si!!!).
El cableado de los guantes es relativamente sencillo y fiel a las instrucciones en Adafruit para NeoPixels. Sin embargo, dado el arreglo dentro del guante y cómo apretado todo lo es, no podemos usar hilo conductor. Puesto que el hilo conductor no es una opción, lo mejor por algo flexibles como un guante es de alambre de silicona. Alambre trenzado de silicona permite una flexibilidad mucho mejor sobre alambre estándar y añade resistencia sobre cable de núcleo sólido.
Usted querrá planear y cortar a todos sus cables, tira la última ⅛"- ¼", luego del paquete y etiquetarlos. Las medidas son específicas de la mano (con añadido margen para doblar y encajar), pero puede utilizar mis medidas a continuación para estimar y averiguar cuántas piezas para cortar:
- Las líneas de microcontroladores (x4) de energía: 27"
- Líneas de NeoPixels (x16) de energía: 5"
- Línea de información a pinky (x2): 22"
- Línea de información, pinky dedo anillo (x2): 8"
- Línea de información, anillo al dedo (x2): 11"
- Línea de información, medio dedo índice (x2): 10"
- Línea de información, el dedo índice al pulgar (x2): 9"
- Las líneas SCL, SDA y el poder del microcontrolador al sensor (x8): 2"
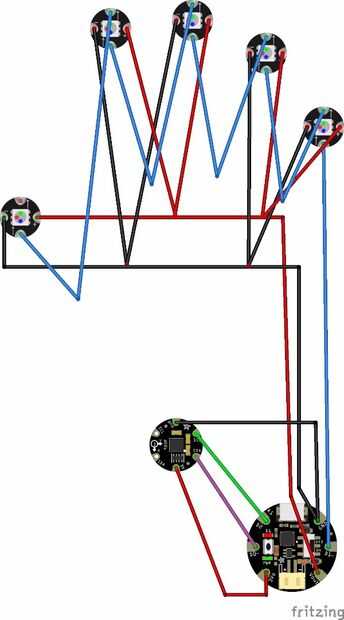
Siga el diagrama de cableado en la foto que hice en fritzing v.0.9.2 para conectar todo. Usando manos y triple comprobando todas las conexiones es muy útil. La soldadura de las conexiones como haría si fuera un portátil. He añadido envoltorio amarillo de la tubería en cada punto de soldadura, esto no es totalmente necesario, pero puede salvar a los dedos de algunos rasguños y proteger los guantes.
Me pareció más fácil al primer alambre las líneas de información en serie luego de la negativa entonces líneas de alta tensión en paralelo. Las líneas de alimentación desde el microcontrolador terminan en el "pulgar" NeoPixel, razón por la cual usted sólo necesita 16 en lugar de 20. Entonces usted quiere utilizar esas líneas de energía "pulgar" para todas las líneas de energía de NeoPixel otros de ejecutar para minimizar la cantidad de cables dentro del guante. Simplemente hice dos ranuras a lo largo de la circunferencia del alambre en la base de los dedos pinky/anillo y los dedos medio índice luego soldar los dos correspondientes a cables de dedo allí (ver la figura correspondiente). Luego cubrí estos puntos con el abrigo del encogimiento de la soldadura (recordar poner en antes de soldar), si no usas shrink wrap uso algún otro recubrimiento para evitar cortocircuitos en el circuito.
Después de agregar el LSM303 sensor sube el bosquejo Dr_StrangeGlove visitando la página de github vinculados y prueba girando el sensor alrededor en el espacio. Asegúrese de leer la Introducción a Gemma antes de hacer esto (por supuesto) y si usted está teniendo problemas, asegúrese de que su Gemma está en modo bootloader al lecto-escritura (mina tiempo cada vez y un rato). Una vez cargado, el NeoPixels debe destellar en patrones aleatorios y colores que es muy fascinante y me atrevo a decir mágico.
Pro tip: escribí el código que podría cambiar la sensibilidad del movimiento utilizado para activar los guantes. El código tal como se establece en activar una vez que las manos van más allá de paralelo al suelo. Usted puede escribir para que activa sólo cuando usted realmente fling tus brazos hacia arriba cambiando el código en línea 42 a "y < -X" (sustituir "X" con su lsm.accelData.y cuando usted aventura tus brazos arriba de la lectura, encontré que algunos donde entre -1600 y -1000). O usted puede activar cuando levantas tus brazos sobre su cabeza cierta cantidad luego mantenerlos por encima de cierta altura por editar línea de 42 a "y > X" (sustituir "X" su lsm.accelData.y de la lectura, encontré que entre 0 y 1000). Sólo nota, sin embargo, usted necesitará modificar el código para que sea compatible con un Arduino u otra tabla serie capaces para que puedan ver las lecturas del sensor correspondiente.
Además, la tasa a la cual los dedos cambian color, o ciclo, se basa en décimas de segundo (es decir, cada 100ms el código es volver a ejecutar). Usted puede hacer este más rápido/más lento al cambiar el retardo en la línea 61.
Por supuesto, si usted está buscando una versión más simple de todo esto, sustituya el sensor de LSM303 con un interruptor de bola simple inclinación. Para una versión incluso más simple que incluso no utiliza un microcontrolador, utilice algunos parpadeo LEDs RGB rápido juntada con el interruptor de la bola de dicha inclinación. No voy a esta ruta para que poder aleatorizar lo colores/flasheo y permitir futuras mejoras.


")




")





