Paso 2: El edificio de Q.T.Pi





Mi papá construyó el marco porque soy terrible en el trabajo con madera. Él también hizo la cuchilla en la parte frontal del robot. Tenemos que hacer todo el cableado, programación y grabación por nosotros mismos.
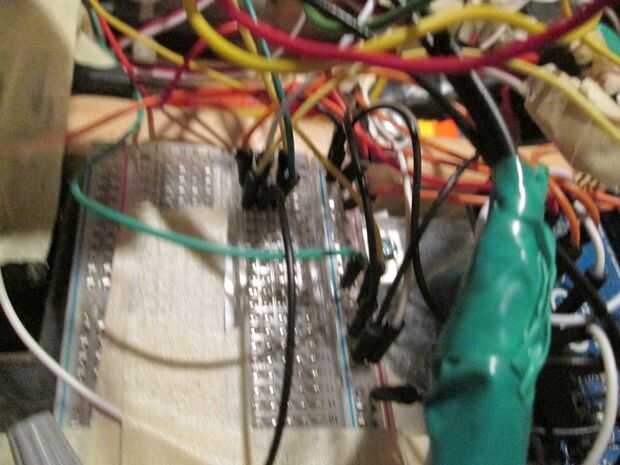
Tuvimos que dividir los cinco voltios pines a cinco pernos diferentes uno para cada regulador del Motor,
uno para cada Sensor QTI y otra para el Sensor de ultrasonidos. Podríamos haber utilizado un escudo de Proto pero nosotros no estábamos pensando en usar que (utilizar un escudo de Proto si usted decide hacer este proyecto).
Hicimos lo mismo en el suelo. Si utiliza un marco de metal podría montar el suelo en el
marco, o usted podría hacer lo que hicimos y rama apagado los cinco voltios sobre una plancha de pan.
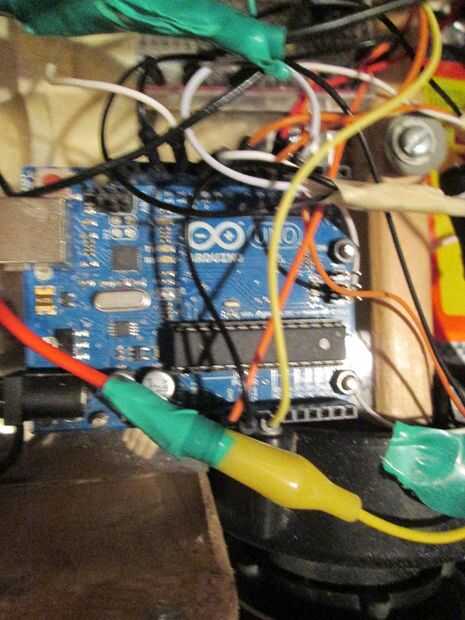
En primer lugar, hemos conectado los pines en los controladores de motores para Arduino.
Los controladores de Motor HB-25 utilizan las mismas señales como harías con un motor de servo es
un montón de información en el sitio web de Parallax. (Enlace más abajo) https://www.Parallax.com/
Entonces hemos conectado los cables provenientes de los motores Motor 1 y Motor 2 en el tablero de HB-25.
A continuación, lleva la batería de Lipo para el positivo (+) y negativo (-).
Después de eso, corrimos un programa de prueba que está también en el sitio web de Parallax.
Luego, empezamos en los sensores QTI, estos trabajo en pernos digitales de Arduino. También toman de 5v y por supuesto un terreno.
Había enganchado para arriba y funcionó el programa de prueba que es también el sitio web de Parallax. (Enlace más abajo)
https://www.Parallax.com/search?search_api_views_f...
Deben leer los valores diferentes si es blanco o negro.
Y finalmente los tres pin sensores de ultrasonidos, esto también va en un pin digital de Arduino.
Utilizamos un pin 3 en lugar de un pin de 4 porque es más fácil programa y tienes un menos cable que más te suelta.




")






![[Rokit Smart] Robot de sumo](https://foto.askix.com/thumb/170x110/4/d7/4d7c9ab4c1ee59b03b3bcab96c8e72a7.jpg "[Rokit Smart] Robot de sumo")

