Paso 10: Asamblea: parte 7
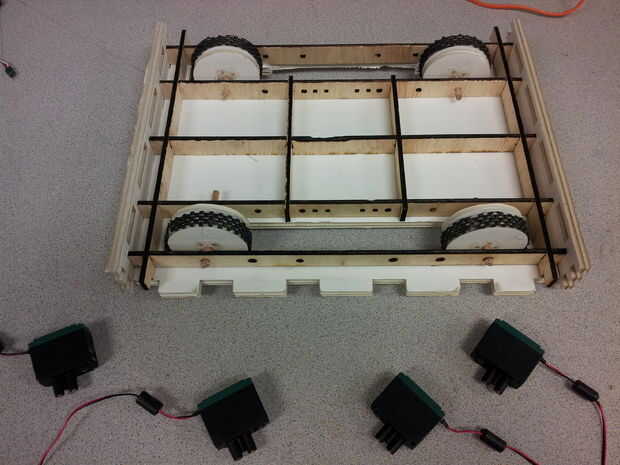

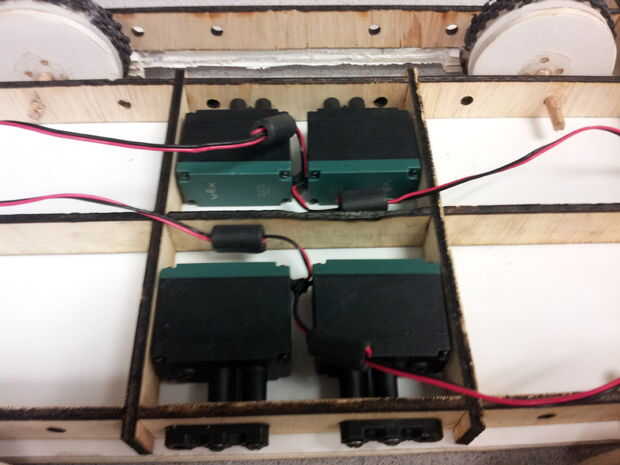




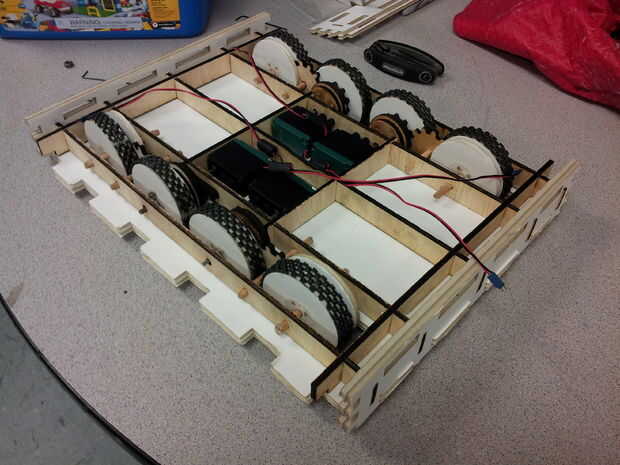
Tomar uno de los cojinetes de Delrin VEX e introducirlo en la parte exterior del soporte de eje interno (el lado más cerca del agujero en la base); tomar algunos tornillos VEX y conecte el Motor a través de los orificios en el cojinete (es decir, no que pasará el eje). Hacer lo mismo con los otros tres motores. Asegúrese de meter sus cuerdas de tal manera que no ponga demasiada presión en otras, ya podría dañar los conectores.
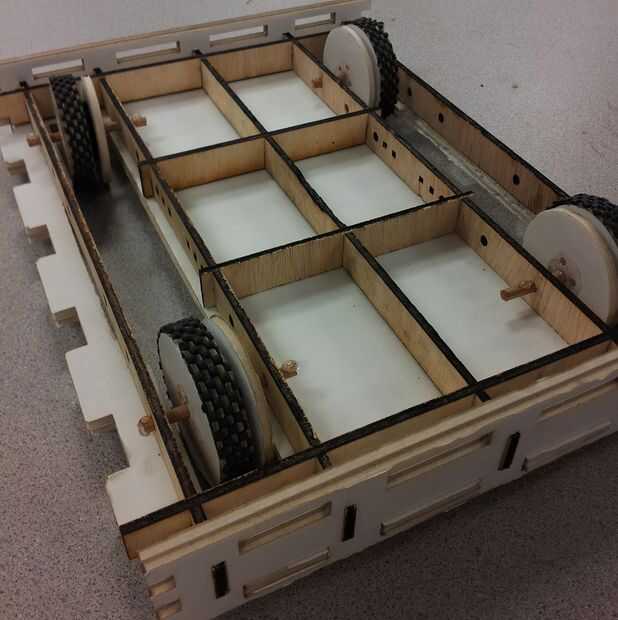
Ahora, toma una impulsión directa montaje de rueda y situado frente al Motor donde debe ir, componentes de madera mirando hacia el interior. Tomar un VEX eje 3" de largo y ejecutarlo a través del ensamblaje de rueda y en el Motor. Asegure el extremo abierto con un Collar de eje VEX. Si es necesario, cortar el árbol hasta la mejor forma (para ello por la marca, luego sacarlo y cortarlo con una sierra para metales). Repita para las otras tres ruedas.
Nota: Dependiendo de cuanto pegamento caliente se utiliza para asegurar los árboles en la tapa del, el montaje de la rueda puede encaja un poco para poder girar libremente con el motor. Si es el caso, tomar un objeto afilado y corte la parte de la base de la espuma que está restringiendo su movimiento.
Finalmente, uno de los engranajes de rodillos de 2" y cortar una longitud de 3" de. 25" espiga. Deslice el engranaje sobre el pasador y comprobarlo; debe girar libremente. Si no, toma un. 25" broca y ampliarla como hiciste los agujeros de soporte de eje.
A continuación, deslice el engranaje entre los engranajes de la dirigir-conducido y montajes de las ruedas Gear-Driven, asegurándose de que los dientes de bloqueo. Si no entra, no forzarlo. Simplemente gire uno de los conjuntos de engranajes para ayudar a maniobrar en su lugar. Deslice el pasador a través, pero no pegue.
Intente convertir al montaje de la rueda de accionamiento directo. Así deben girar el engranaje del rodillo y otro conjunto de ruedas. Si no, girar cada uno individualmente para localizar el problema; arreglarlo por ensanchar los agujeros o recortar la espuma en la base.
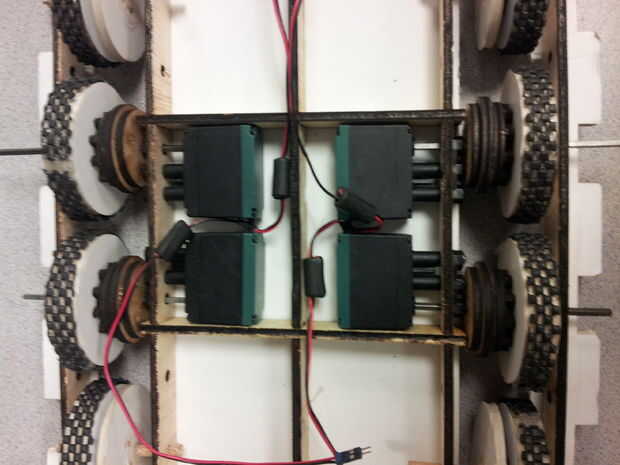
Una vez todo gira correctamente, aplique el pegamento caliente a cualquiera de los extremos de los ejes de los engranajes intermedia; no necesitan girar, así que ir tuercas!
¡ Felicidades!!!!
El robot está construido (más o menos). El conjunto restante sólo es el accesorio de los lados y la base; no muy todavía aunque. Necesita configurar el microcontrolador VEX y asegúrese de que todo funciona antes de sellar todo para siempre.

")









 con una Simple caja de botón--usando ICSP cabecera")

")