Paso 3: Perro tratar el sistema de entrega




Él tenía la idea de usar el Zevro cereales prescindir de este particular motor conectado. También va en una dirección diferente que puede ser interesante para algunas personas leer este instructable, un alimentador del animal doméstico con conexión a internet.
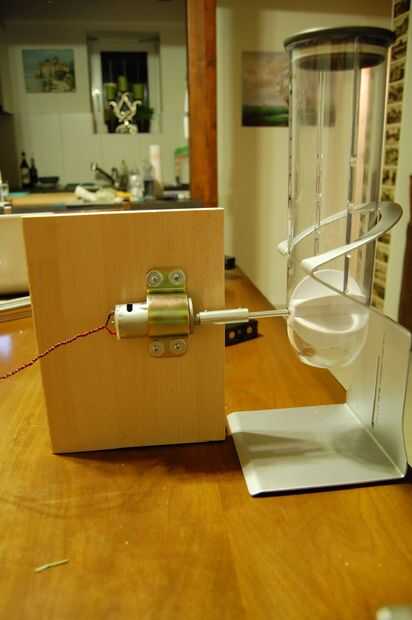
Habla de los problemas con la hoja de goma y cómo decidió tomar la ruta motor engranada, alto par y baja velocidad de torneado. Su idea funciona perfectamente y el giro lento de la hoja le permite entregar un lote poco agradable de trata a la vez. También diseñó y publicado un diseño para un encargo
conectar el motor en el depósito de alimentos secos Zevro, que también hice. Pero las similitudes terminan después del tipo de motor y Zevro, porque usé el Arduino MEGA y el escudo ArduMoto para funcionar el motor.
Para la pieza de madera y hardware:
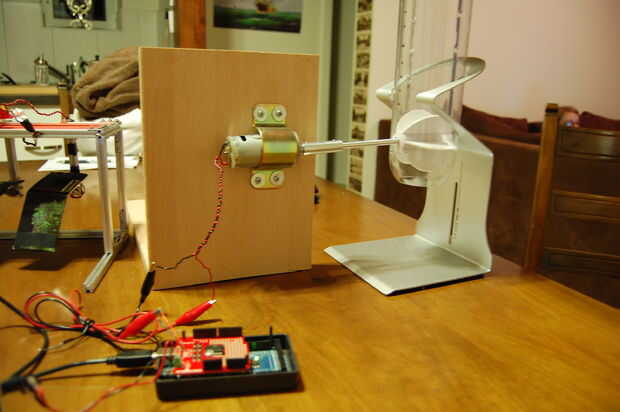
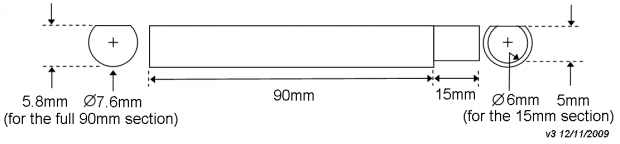
Fui a la ferretería local y comprar varias piezas. Las imágenes incluidas en este paso ilustran bastante bien lo que hice. Primero compré un estante de madera barato y una sierra y unos soportes en forma de L para hacer un soporte para conectar el motor. Entonces me encontré con una "abrazadera de mástil,' una pieza para fijar el motor a la Junta. Usted tendrá hasta encontrar uno que coincida con el tamaño del motor que compra. (Yo usé un motor de caja de engranajes de alto torque por razones discutidas anteriormente). Una vez que usted hace el acoplamiento y el eje o encontrar una solución alternativa, puede atornillar todo juntos.
Para el motor y el programa de instalación/código de Arduino:
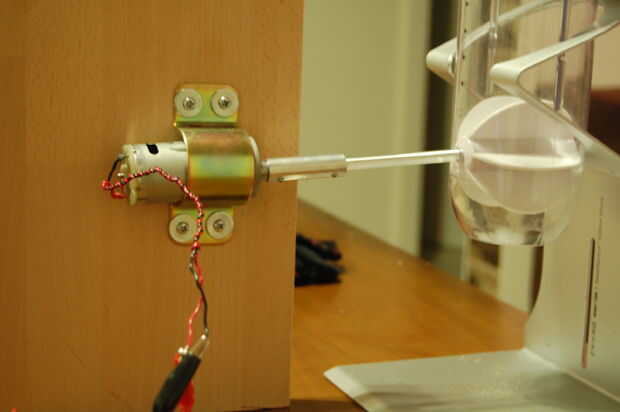
En primer lugar, he seguido esta muy detallado tutorial de Sparkfun para probar el escudo ArduMoto. Una vez que lo haya completado, debería tener una idea de trabajo del escudo. Al tiempo no tuve terminales de tornillo para conectar a la ArduMoto así que a soldar dos alambres directamente en la B terminal 3 y 4. Entonces conecta los dos cables por cable de puente 12 VCC 4 RPM motor. Nunca el orden de los cables es importante porque sólo les intercambio cambia la dirección del motor, que puede controlar a través del escudo ArduMoto. Para ArduMoto terminal B, la dirección es hard-wired a Pin 13 y es el pin de modulación de ancho de pulso en el Pin 11.
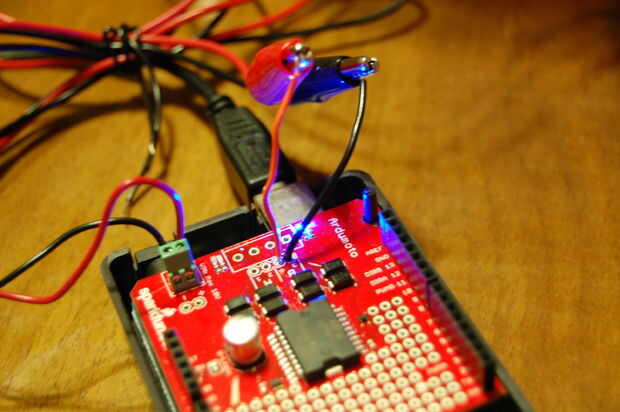
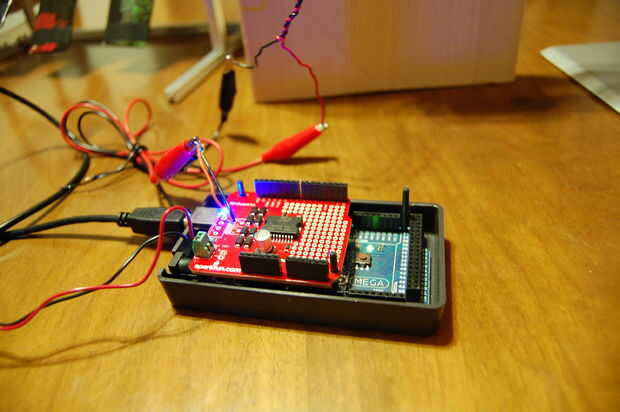
En la imagen puede ver el escudo ArduMoto en acción sobre el Arduino Mega 2560 en caso de un pequeño proyecto. La caja de plástico en la parte inferior es absolutamente necesaria si se trabaja con el escudo de Ardumoto, porque el motor puede estar fácilmente en corto circuito tocando los pines expuestos en la parte inferior de la arduino.
Este motor es un motor de DC a 12V que puede girar en cualquier dirección. Elegí éste debido al esfuerzo de torsión proporciona para poder dar vuelta a esta lámina de goma de silicona, pero viene a costa de RPM de que este motor que es clasificado en un lento RPM 4.
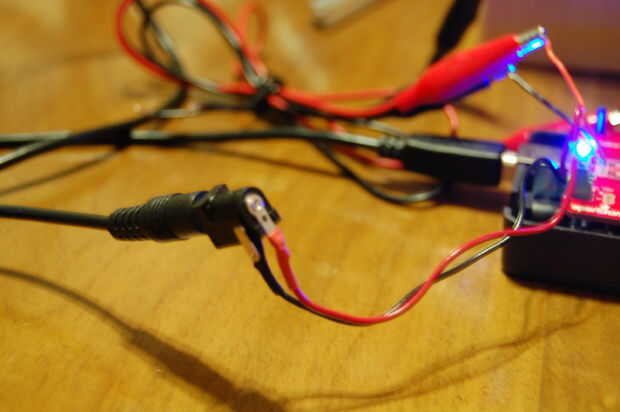
Porque el motor tiene 12 V para ponerse en marcha, los 5 V potencia de la placa Arduino no es suficiente, así que suave alambré un clavijero para el arduMoto aquí para conectar a una verruga de la pared de 12V.
Se puede ver que la Junta Ardumoto tiene unos LEDs de estado que parpadean en un cambio en la dirección o mediante el envío de una señal de pulso modulada a través de la potencia de salida.
Este es el código que utiliza para ejecutar el motor:
/ * Prueba de ArudoMoto * / int PWM_B = 11; Estos dos pines están reservados ya en el escudo de arduMoto void setup() pinMode (PWM_B, salida); Pines de control conjunto que salidas void loop() Este programa que encender y apagar el motor cada segundo. Delay(1000); digitalWrite (DIR_B, alto); Puede ser usada motor la dirección contraria, 1 - alto, 2 - bajo analogWrite (PWM_B, 255); fijar el motor a funcionar en 255/255 = 100% ciclo de trabajo para obtener el par necesario. Delay(1000); analogWrite(PWM_B,0); giro del motor
/ * Randy Carney * /
int DIR_B = 13;
{
pinMode (DIR_B, salida);
}
{
}
Puede cargar este boceto en el IDE de Arduino y subirlo a la junta después de hacer todas las conexiones y ver si funciona! Si lo hace, puede pasar al siguiente paso, si no, poner una descripción de lo que está sucediendo en los comentarios y podemos tratar de averiguar el problema.











