Paso 2: Una típica sin escobillas Outrunner


Montaje el Outrunner
Así que la cosa fresca sobre avanzados si el nombre no regalarlo ya que es la carcasa exterior del motor es la parte que gira . En la primera imagen, solamente la placa frontal del motor - la parte que los cables de salida a través de - es inmóvil, y que es la parte que obtiene montada en algo sólido. De lo contrario, todo el resto de la brillante gira de campana de oro y plata. Esto tiende a hacer el motor inadecuado para "DC" convencional montaje como la abrazadera de montaje o montaje de doble apoyo. La idea de lo outrunner en aeromodelismo es que se puede montar directamente una hélice para ello rotor bell.
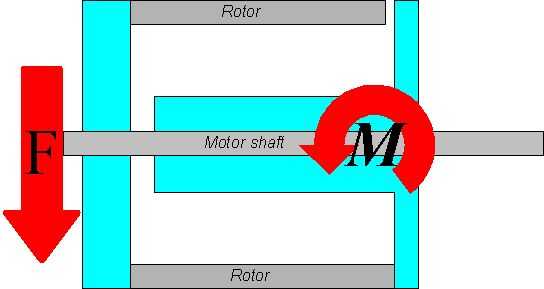
Sin embargo, para uso EV, montaje de una rueda dentada, polea o rueda directamente al motor de esta manera es una mala idea . La razón se muestra en el diagrama en la imagen 2. El cojinete de eje de la campana es efectivamente en voladizo, que significa una carga de lado fuerte (como tensar la cadena o correa o con una carga de rueda) puede de la curva sumotor entero . Cuanto más tiempo lo motor, la peor es este efecto. En cambio, todos los motores más pequeños también colgar el eje hacia el otro lado del motor, por lo que puede ser convencionalmente montado y utilizado. Este es el final que quiera montar un componente radial de la carga como un piñón sobre - ruedas dentadas y poleas o engranajes para el caso, pueden a menudo por stock comprado con el derecho de tamaño de alesaje.
Leyendo el Outrunner
Avanzados por lo general se dan una designación numérica similar a
AA-BB-C(Y/D)
Hay dos sistemas superpuestos, casi indistinguibles y tipo de conflicto sobre el significado de las letras.
Primero es el sistema de Referencia del estator . En este sistema:
1. el primer número AA indica el diámetro del estator en milímetros. Este es el componente activo en un motor que genera el esfuerzo de torsión, así que esto es similar a la venta de coches de cilindrada.
2. el segundo número BB indica la longitud del estator (altura), o la longitud de los imanes.
3. el tercer número de C puede ser un número bajo (solo dígitos a 20s), indicando el número de alambre de vueltas por el polo del estator. Si se trata de un alto número (alto decenas a cientos) es el motor "Kv" constante o constante de voltaje en RPM / V
4. un medio opcional de Y o D que las bobinas son terminada Y o Delta - por el mismo turno cuenta, terminó Y motores giran más lento y con más esfuerzo de torsión para la misma corriente, pero necesitas una tensión mayor para lograr dijo corriente. Es un equilibrio de diseño, pero la gran mayoría de R/C avanzados es Delta por conveniencia.
El segundo es el sistema de referencia de motor , más común para los motores baratos, en lo que sólo puedo asumir es una estratagema para amplificar el tamaño aparente del motor.
1. el primer número AA ahora se refiere al diámetro total del motor, en milímetros.
2. el segundo número BB es la longitud total de la caja de motor, de adelante hacia atrás, menos el eje.
Los números terceros y cuarto por lo general siguen siendo los mismos.
...
¿Cómo saber que uno es lo que? Si su no explícitamente dado como diámetro del estator , es probablemente este último sistema. La forma más definitiva para saber es si tienes dos puntos de datos - estator y diámetros exteriores. Una lista del típico motor de estator diámetro Cruz correlaciones para motores de vehículo tamaño típico se expone a continuación:
caja motor de > 50 a 55mm de estator de 42 a 45mm Dimensionar el Outrunner
caja de motor de > 63 a 65mm de estator de 50 a 52mm
motor caja de 68 a 70mm del estator > 80 a 85 mm.
Scooters eléctricos más encontrará un motor en la clase de diámetro de 60mm (motor) más que suficiente. Un buen vendedor te dará al menos dos importantes especificaciones que puede utilizar para determinar parámetros de transmisión rudimentarios.
1. la clasificación nominal Kv es a qué velocidad girará el motor por voltio aplicada. Por el contrario, es cuántos Voltios genera el motor a través de sus terminales si se gira . Esto es en gran parte un remanente de los días de motor DC cuando podría volcar su motor con la batería y hacer girar. Controladores electrónicos, tales como controladores de BLDC, realmente pueden variar este parámetro del motor significativamente, por lo que el Kv es sólo una regla a menos que seas un Ingeniero de motor .
Puede utilizar la clasificación de Kv en RPM/V, el voltaje del sistema, su relación de transmisión anticipada del motor a la rueda (x 1) y diámetro (en pulgadas). para calcular una velocidad máxima teórica del vehículo. Este es un número puramente teórica en un mundo ideal, sin fricción. La ecuación va
Velocidad (mph) = [( RPM/V * tensión de sistema ) / (desmultiplicación )] * (diámetro * pi ) * (60 minutos por hora / 12 pulgadas por pie) / (5280 pies por milla)
Un recurso poco fresco que hace todo esto para usted y hasta le proporciona aceleración y figuras de la batería es la calculadora de amperios hora y par motor tentáculo , escrito para la comunidad de robot de combate por la tarde Steve Judd, mucho tiempo Battlebots y competidor de combate de robot. El sitio web se mantiene como un recurso para los constructores de robots. Como era de esperar, es muy "robot orientado", pero para utilizar para los cálculos de vehículo, sólo enchufe en su propio motor estadística (o una conjetura mejor) y usar 0,5 motores por lado si tienes sola impulsión del motor. Tenga en cuenta que '% promedio del pico de drenaje ' debe girarse hacia abajo a 5% o 10% para uso EV - es la cantidad de tiempo pasa haciendo quemaduras o lanzamiento de parada. Una base de datos de catálogo motores existe para el control de la cordura.
Si usted sólo tiene una calificación de KV, lo único que se puede calcular es la velocidad máxima.
2. la resistencia interna de la bobina del motor, también conocida como resistencia, resistencia terminal, etc.. Generalmente será un número bajo (menos de 1) ohmios . Teniendo en cuenta este valor y el voltaje del sistema, se puede calcular la corriente máxima teóricamente puede ver el sistema basado en la ley de Ohm, I = V / R . Corriente real será menor (pero no mucho menos) que este valor debido a la resistencia inherente del alambre de cobre, semiconductores, cambiar los contactos, etc.. Pero una vez más, un estadio de béisbol.
Además, como se describe en mi writeup just-build-your-own-damned-motor-already, dado el Kv del motor en RPM / V, también puede encontrar el par por amperio de corriente. RPM/V no es una unidad SI, pero un poco de matemáticas te llevará a la definición de la SI de la constante de tensión de un motor eléctrico, V / (rad/s); es decir, voltios por (radianes por segundo). En corto, la constante de tensión en V / rad/s es la constante de par de apriete en Nm / A o Newton-metro por amperio .
Si usted es inclinado, Nm / A puede ser directamente detrás-convertido en ft-lb/A o en-oz/A, como son todas las unidades de esfuerzo de torsión.
Por lo tanto, si sabes IR del motor y el voltaje del sistema, usted puede encontrar un valor de esfuerzo de torsión máximo teórico para el sistema, que es útil para el cálculo de aceleraciones máximas: par motor (Nm) = (Nm / A ) * (tensión / resistencia de Motor ). De hecho, este número es muy teórico. Voy a encarar consideraciones especiales para motores RC cerca de puesto en un poco de tiempo.
Dimensionamiento más de lo Outrunner
Algunas veces, también verá una potencia - generalmente en los cientos o miles de watts. Es importante recordar aquí que el valor dado será casi siempre potencia de entrada - es decir, el poder de su batería es alimentación en el motor. Si está familiarizado con los principios de motor DC, sabes que el motor puede solamente siempre entregar el 50% de este valor retroceda como mecánica de potencia de salida - tiempos de esfuerzo de torsión de la velocidad. (Si no, leer esto ). Y si es un motor ideal - en este punto de trabajo, 50% o más de la energía de entrada está siendo disipada como calor. Esencialmente, la figura de la "potencia" no es muy útil, ya que si el motor funciona en cualquier lugar cerca de la mitad de la figura, rápidamente se recalentará.
En última instancia, la forma tamaño un motor de potencia es más o menos calcular su fuerza de arrastre total utilizando la ecuación de arrastre, y suponiendo que el Cd trata de 1.0 (para una persona de pie y seguir adelante) y que por su velocidad de crucero deseada - en unidades del SI, el resultado es la potencia que el motor necesita salida para mantenerlo va a esa velocidad se multiplican. En otras palabras, Pmotor en vatios = (Fuerza de arrastre en newtons * Crucero velocidad en metros por segundo).
Como regla general, esto debe ser menos del 15% de la máxima potencia de entrada motor.
¿Por qué no un Inrunner?
Un "inrunner" es la palabra detrás-construido para un motor sin escobillas convencional. En el dominio de la aeronave, son mucho menos adecuados para la propulsión de vehículos porque gira bastante más rápido , es decir tiene muy altos los valores de Kv. Posteriormente, requieren mucho más geardown para alcanzar los mismos niveles de esfuerzo de torsión. Inrunner unidades son sin duda posibles, la mayor complejidad mecánica es subóptima. Sin embargo, son definitivamente más fácil de montar y menos susceptible a conseguir tierra y camino de basura en el motor.













