Paso 5: Consideraciones mecánicas especiales para R/C Control Sensorless
El más eléctrico ciclos su controlador ve, cuanto más rápido se bloquea
Motores de corriente alterna (y motores sin escobillas son técnicamente AC - los detalles son inconsecuentes aquí) puede tener diferentes relaciones de velocidad eléctrico a velocidad mecánica. En el más básico de 3 fases motor donde hay 2 polos de imán y 3 ranuras de estator (tres bobinas, en otras palabras), la velocidad de rotación eléctrica es igual a la velocidad de rotación mecánica. A medida que aumenta el número de pares de polos del imán, también lo hace el cociente de velocidad eléctrico velocidad mecánica - de hecho, uno a uno. Una buena animación de este principio puede encontrarse en el sitio LRK (los chicos que los popularizó avanzados de cuenta poste alto en el mundo del aeromodelismo)
Es importante tener en cuenta que un motor de alto Polo cuenta no necesariamente más esfuerzo de torsión, pero hasta un límite, la adición de ranuras y polos se divide el valor Kv del motor (y el par motor producido por amp que ya no necesitan reductores a propulsores de la unidad. El ángulo que del motor tiene que mover entre alineaciones de polos del estator de imán es menor, por lo que debe cambiarse con frecuencia para lograr el mismo desplazamiento.
Sin embargo, debido a controladores sensores dependen de tener una forma de onda de voltaje del motor regular a 'lock en' a, esto puede ser ventajoso. Engranaje del motor hace dos cosas. Uno de ellos, como se dijo, es el hecho de que el controlador tiene que cambiar más para lograr el mismo desplazamiento. Cuando se combina con vehículo masa y la inercia rotacional del motor, tiende a resultar en un perfil más suave de la FEM.
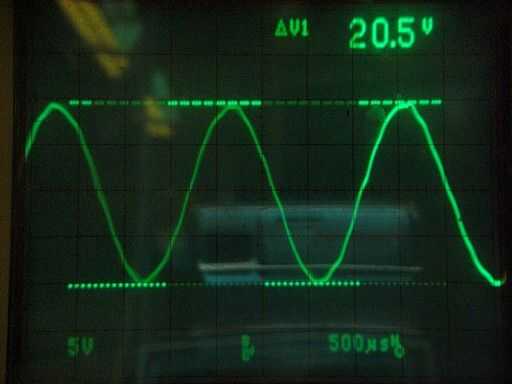
La cabecera de la imagen es una foto de un motor qué Perfil de voltaje terminal realmente se parece a cuando está en funcionamiento.
El segundo efecto es...
Reducción de velocidad también divide su inercia.
¿Recuerdas cuando dije que las hélices de aeronaves no son cargas inerciales , es decir necesidad de distinto de cero par para empezar a acelerar? Para aproximar en un vehículo, necesita reducir su inercia por el motor tanto como sea posible. Puede ser demostrado que la masa aparente de una carga en el motor desciende como un factor de 1 / R ^ 2 , donde R es el cociente de reducción de velocidad (es decir, R a 1). Ya se puede ver si engranaje un motor incluso alrededor de 8 o 10:1, que prácticamente se convierten en inexistentes en cuanto a se refiere.
Por lo tanto, sin sensores transmision beneficiarse de proporciones muy alto geardown
Es importante tener en cuenta que no importa cuánto motorreductor abajo, se necesita cierta cantidad de empuje a partir . Puede ser tan poco como la acción de saltar sobre el vehículo que pone adelante un poco, pero con la posible excepción de la absurda limitación de los casos, no podrás colocar en ella y golpear el acelerador. Se puede trabajar, pero el inicio será inestable y desigual (un fenómeno en el mundo de R/C, conocido como "cogging") y causas altas corrientes a ser dibujado. Prolongado intento de lanzar de parado por lo tanto puede causar sobrecalentamiento rápido de ESC y el fracaso. Así que eso significa...
¡ No lo piso.
.. .unless el vehículo se está moviendo ya. Sensorless operación a baja velocidad generalmente requiere un dedo firme y puede ser inestable. El controlador puede perder la sincronización con el motor, lo que significa que cambia las fases equivocadas en el momento equivocado. Pérdida de sincronización también puede ocurrir si se está moviendo poco a poco y luego aumentar pronto el mando del acelerador. Mayoría de los controladores asumirá que el motor puede girar para arriba en algunos aceleración angular mínima - que, con su carga, no puede ser cierto. Esto también produce pérdida en sincronía.
Resumen
Sensores controladores de R/C pueden resultar en un vehículo con parada inesperada (o sólo decepcionantes) y rendimiento de baja velocidad. Engranaje de un motor rápido con una alta proporción puede aliviar este problema, así que mantenerlo como una consideración de diseño cuando se ejecuta cálculos de transmisión.













