Paso 10: Placas de circuito impreso: placa de localización
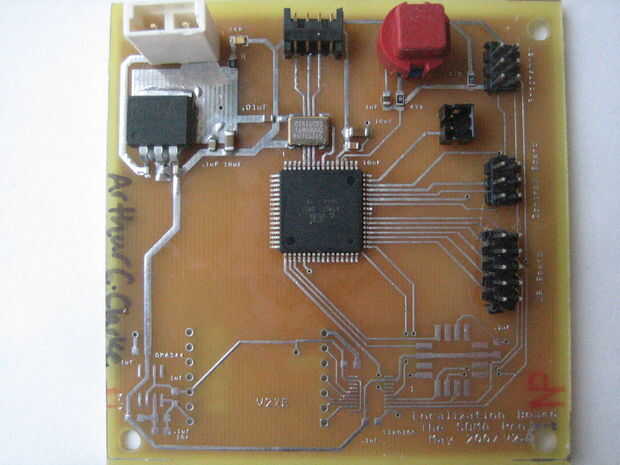
La Junta de localización trabaja controlando el infrarrojo y las tablas de tiempo de vuelo, que se utilizan para calcular la posición relativa de los diferentes robots. La Junta de localización genera una señal de 24kHz para la Junta del ToF y una señal de 36,7 kHz para el tablero del IR. Las señales duran alrededor de una docena de ciclos y sólo se emiten por un robot en un momento. Los otros robots reciben esas señales, y porque la luz viaja aproximadamente seis órdenes de magnitud más rápidas que el sonido, el tablero de ToF es capaz a la vez la diferencia entre una señal de IR llegar y una señal ultrasónica que llegan en tres puntos diferentes en el robot. Para más discusión de la profundidad de este método, véase el informe formal (que incluye bonitas ecuaciones para calcular la distancia y la posición de transmitir robots).
Otra cosa a notar es que el tablero de localización tiene espacio para una brújula digital y un giroscopio. Estos fueron diseñados para y habría permitido un posicionamiento más preciso, pero debido al tiempo quedaron las limitaciones de la versión final.
Para montar la placa de localización, comenzar con el regulador de 5V, que rodean casquillos y las piezas de LED de potencia. Prueba de la salida del regulador como en los anteriores pasos asegurándose de que el LED se enciende y que la salida permanece constante a 5V.
Una vez que este trabajo siga adelante y montar el resto de la Junta (menos la brújula y giroscopio). Asegurarse que no haya cortocircuitos antes de conectar la alimentación y luego prueba el tablero tratando de programar el microcontrolador. Ahora está listo para el siguiente paso.
")












